



Category
Difficulty
Platform

Digital Back
The main issue this project will try to address is to improve our sitting habits. The Idea behind the project is to equip the back of your chair with a number of range sensors and measure your sitting position. A user will be notified by a small vibration motor about invalid sitting postion.

Mini Drum Pad With Imxrt
This is simple Drum Pad built with Cap-sense touch and IMX-RT.
Smart Seedling Grow Tray
An easy to build Seedling Grow System with some brain and remotely management features.
It is designed to enable everyone especially children to grow seeds at home without getting worried about over or under watering them. Or are the temperature and humidity friendly for the chosen seeds or not?

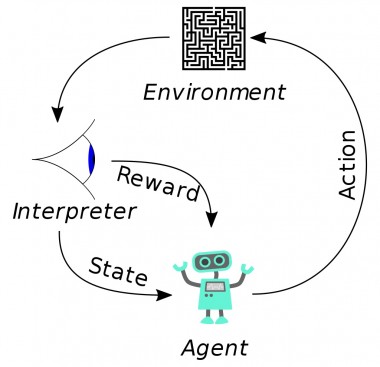
Reinforcement Learning Based Illumination Controller
This project envisages a reinforcement learning based automatic home illumination system. The system shall learn and adapt to the preferred illumination settings from immediate ambient conditions. The system shall also perpetually, keep learning and optimizing itself based upon the accuracy of its control predictions.

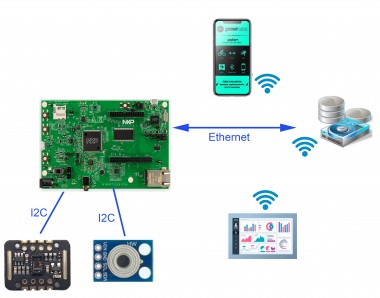
Remote Patient Monitoring
An IoT device for remotely monitoring important health parameters of a patient.


Running Faucet Alarm
Detect running faucet using low powered i.MXRT1010 Development board and Edge Impulse Studio
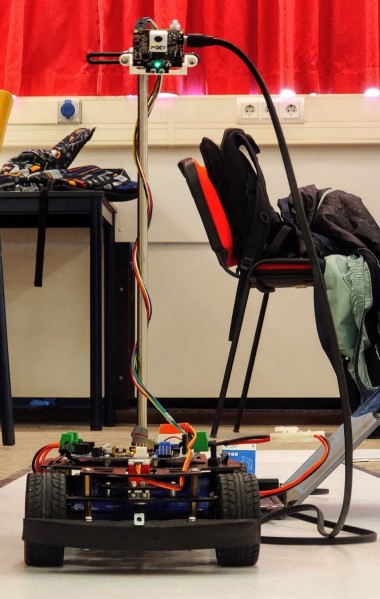
Ryfe
In this project we are going to program a little car te avoid objects and drive between 2 lines in the fastest time posibble, this in the form of a competition called NXP cup. We are a group of 3 people and all are automotive engineering students at fontys university of applied siences.

Machinegun
Machinegun NXP car
Clown Fiesta
NXP Cup participating team

Supersupersmart Autonomous Car (nxp Cup 2021)
Badass robot car developed by reasonably advanced monkeys

Feit Brains
This project is from University of Žilina team participating inNXP Cup. Starting with assembling the hardware through making the code until testing it on track.

Novsu-5
Nxp cup project
Novsu-3
NXP Cup project

Novsuteam6
NXP Cup project
Hsd - Roadster Mmxx
Setup of an autonomously driving vehicle on a predefined race track.
The track can turn for a race.
The vehicle recognizes the racetrack without any outside interference and sees it as quickly as possible.
It is a challenge in the NXP CUP to race against other team contracts.
Knightrider::kitty
An autonomous vehicle in scale 1:18 powered by two independent electric engines and steering by using servo. Our car is adapt to race in EMEA NXP CUP competition. The goal is use a PIXI CAM 2 camera to give our car eyes and to write perfect algorithm to be the fastest.
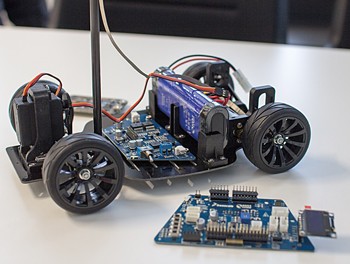
Microspeedster
The goal of this project is to build a car that drives through an unknown course, using line scan cameras to control the direction and Hall sensors to control the speed. The intelligence is programmed on an ARM Cortex M0+ based microcontroller. There is also further useful peripherals installed to improve performance.
Now Sequitur
Make a self-driving car in C using MCUExpresso and Mbed