
Maker Faire Rome 2025 Sunday: Rovers, Tools, and Satellites
Sunday at Maker Faire Rome continued the hands-on theme with interviews across practical robotics, test equipment, open hardware, student avionics, and space IoT. Each team brought real hardware to the table: sensors, compute boards, radios, and tools, so you can see how ideas become working systems.
In the interviews below, you’ll learn what each group builds and why it matters to makers: how a rover splits perception and control, how a PCB workstation speeds debug, how open tools like LED badges and PSLab empower learning, how students design rocket payloads, and how pico-satellites move small packets straight to orbit!
Sapienza Technology Team – CC8 Rover (ERC)
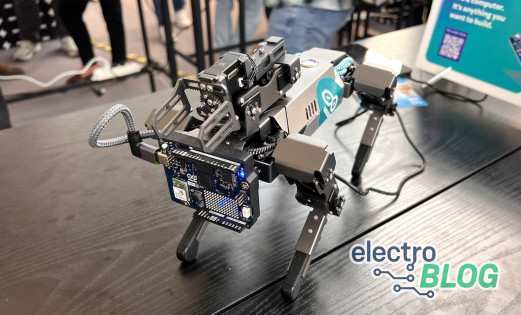
Francesco from the Sapienza Technology Team walked us through CC8, a competition rover built for the European Rover Challenge. The platform splits compute between an NVIDIA Jetson Orin Nano for perception and autonomy and an ESP32 for low-level control, keeping real-time tasks responsive while higher-level software plans the route.
The team runs ROS 2 Humble, using a stereo camera for SLAM and under-body cameras to assist manipulation and maintenance tasks. A robotic arm and drill support sampling and terrain analysis, while STMicroelectronics boards help drive the motor control stack that the team implemented at the low level.
- Compute split: Jetson Orin Nano handles vision, planning, and autonomy; ESP32 runs motor control loops and I/O.
- Software: ROS 2 Humble with stereo-camera SLAM; additional cameras aid tool alignment and panel operations.
- Hardware: Robotic arm, drill for soil sampling, sensors for terrain analysis and localisation.
- Motor control: STMicroelectronics boards support the drivetrain; custom low-level controllers by the team.
Why it matters: A clean division between high-level planning and deterministic I/O is a repeatable pattern for student and maker robotics builds.
PCB Workstation – Modular Holding and Probing Tool
Giuseppe Finizia demonstrated a PCB workstation designed for secure, flexible handling of circuit boards during repair, debugging, and prototyping. The base features sliding PCB holders that adapt to boards of various shapes and sizes, keeping them stable while you work on connections, components, or traces.
Articulated arms equipped with spring-loaded probes allow consistent electrical contact without damaging pads or pins. The probes connect to standard lab equipment via supplied leads, making the setup equally useful for hobbyists and professionals working on development or diagnostics. The product is available through the maker’s online store.
- Board support: Sliding holders accommodate a wide range of PCB sizes and shapes.
- Probing system: Articulated arms with internal-spring probes ensure steady electrical contact.
- Connectivity: Quick link to oscilloscopes, power supplies, and other lab tools via provided cables.
- Applications: Ideal for repair benches, prototype debugging, and general electronics development.
Why it matters: Reliable fixturing and stable probing reduce troubleshooting time and make repeat measurements easier for both students and professionals.
OpenTech / FOSSASIA – Open Hardware Tools (LED Badge, Pocket Science Lab)
Two community-driven open-hardware projects from OpenTech and FOSSASIA combine accessible hardware with open-source software, giving makers practical tools for learning, testing, and collaboration.
LED Badge
The programmable LED badge can display custom messages and graphics through an open-source app available for Windows, Linux, and iOS, with a new client developed in Flutter. Both the hardware design and firmware are published on GitHub, encouraging modification and reuse for events, workshops, or teaching environments.
Why it matters: The LED badge demonstrates event-friendly embedded workflows and rapid user interface iteration in a simple, portable format.
Pocket Science Lab (PSLab)
The Pocket Science Lab is a compact, all-in-one lab tool featuring an oscilloscope, multimeter, and a range of sensors. A built-in microphone enables live signal viewing, while CircuitPython support makes it compatible with the Adafruit sensor ecosystem. Developed through collaboration with the wider FOSSASIA community, the PSLab invites contributions and extensions from anyone interested in open hardware.
Why it matters: Low-cost instrumentation like PSLab reduces barriers to testing, learning, and field measurement for students and hobbyists alike.
Sapienza Space Team – Rocket Payload Electronics (SAS)
Marit Gasperoni from the Sapienza Space Team described the group’s work on payload electronics for an American student rocketry competition. Each year’s design balances integration and modularity; some versions embed all systems on a single PCB, while others use swappable modules to simplify testing and replacement. The payload handles sensing, logging, and telemetry during flight.
The team’s electronics rely on a straightforward architecture built around a Raspberry Pi for data processing and communication over standard serial buses. Sensors measure temperature, pressure, orientation, and position, while regulated power rails keep the system stable throughout ascent and recovery. Recent updates moved toward a modular layout to reduce redesign time between projects.
- Sensors: BME280 for temperature and pressure, MPU-series IMU for acceleration and rotation.
- Navigation and telemetry: GPS module and long-range radio for real-time tracking and data transfer.
- Controller: Raspberry Pi with serial connections to sensors and external devices.
- Design evolution: Shift toward modular boards to avoid complete PCB re-spins and enable faster iteration.
Why it matters: This approach shows a teachable avionics design that students and makers can replicate using common off-the-shelf components and clear subsystem boundaries.
Abel Space – Direct-to-Satellite IoT
Stefano from APEGEO Space outlined how the company is developing a constellation of small pico-satellites to support direct device-to-satellite links for low-throughput IoT, small, infrequent packets of data like sensor readings or location updates. Each satellite is about one-third of a CubeSat unit, designed to form a 100-satellite network by 2027, with ten already launched and undergoing live testing.
The project’s goal is to bypass ground gateways entirely, letting devices in remote or oceanic areas transmit directly to low Earth orbit. Booth demonstrations showed end-to-end communication using prototype nodes that connect to the constellation. The design targets real-world cases like container tracking, maritime telemetry, and sensor monitoring in isolated locations.
- Platform: Compact ⅓U pico-satellites; 100-unit constellation planned by 2027, with 10 in orbit for trials.
- Objective: Enable direct uplinks from devices to LEO satellites without local infrastructure.
- Use cases: Maritime and remote asset tracking, container logistics, and environmental telemetry.
- Demo: Booth nodes demonstrated full end-to-end data transfer between devices and satellites.
Why it matters: Near-global coverage for simple sensors becomes practical when communication skips ground stations, cutting cost and setup complexity for field deployments.
Final Thoughts
Sunday’s interviews revealed a clear thread: efficient systems come from pairing the right compute with reliable tools and collaborative communities. From Jetson and ESP32 boards on rovers to Raspberry Pi avionics, from modular PCB workstations to open-source labs and satellite networks, each project showed how careful integration achieves more with modest hardware. Together, they highlight a maker culture focused on practical engineering and shared learning, extending from the lab bench to low Earth orbit.

Residing on the south coast of England, Rich has spent the last few years building Electomaker.io from the ground up. He is usually found behind a laptop coordinating the rest of the EM team and occasionally finding time to contribute articles to the blog. When not tapping away at a laptop, he can be found either paddleboarding, at the beach, playing golf (badly), or camping with his family.






















Leave your feedback...