

Jecc
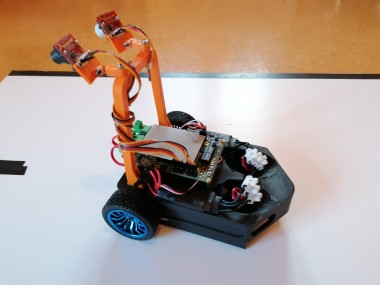
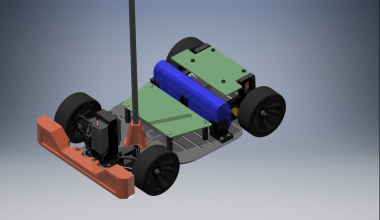
We build our own differentially driven NXP-Cup platform based on a 3D-printed chassis.
We also developed our own control electronics around the FRDM-KL25z board.


Arcar4
nxp cup
Gvb West
We are creating an autonomous vehicle that can drive along an unknown track, changing speeds and stops when it is told to.
Totally Speed
Totally Speed is a french team from the engineering school INSA Toulouse!
Our project this year, as fourth-year automation and electronics students, is to develop and improve a superfast autonomous car. See you on the racing circuit at the NXP Cup in 2021!
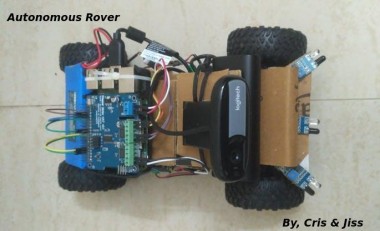
Deodates - Autonomous Rover
A modified RC car for autonomous operations
Rob_inp_les Semi-croustillants
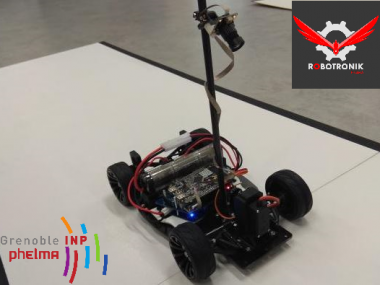
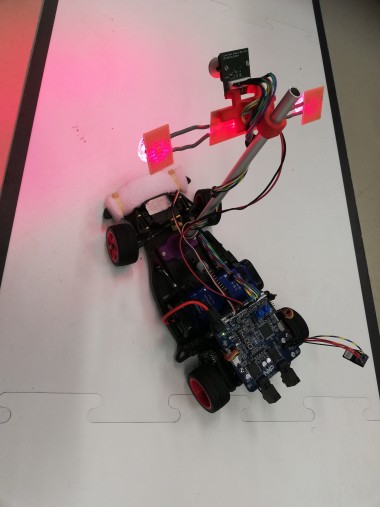
Une carte de puissance est ajoutée pour optimiser la répartition des ressources du véhicule.
Un laser monté sur un support imprimé en 3D sera utilisé pour le challenge d'évitement d'obstacle.
Polytechnicecar
We are three students of the EIT master of Autonomous systems, with experience in different backgrounds and a great desire to learn.

Novsu-4
NXP - Cup
Arcar5 Project P3
Programming of an existing NXP car with ARM M4 Processor, we have already the hardware but not the software.
Speedynsa
NXPCup Team 1 For INSA-GEI, Toulouse, France
Totally Speed
NXPCup team2 for INSA-GEI, Toulouse, France
Paced
We are participating in the NXP Cup, it’s a competition where we build and program an autonomous robotic car. We want to demonstrate that anybody with determination can learn to code, with the majority of the team having never coded before. We would like your support to demonstrate that anybody can do it.
Now Sequitur
Make a self-driving car in C using MCUExpresso and Mbed
Microspeedster
The goal of this project is to build a car that drives through an unknown course, using line scan cameras to control the direction and Hall sensors to control the speed. The intelligence is programmed on an ARM Cortex M0+ based microcontroller. There is also further useful peripherals installed to improve performance.
Knightrider::kitty
An autonomous vehicle in scale 1:18 powered by two independent electric engines and steering by using servo. Our car is adapt to race in EMEA NXP CUP competition. The goal is use a PIXI CAM 2 camera to give our car eyes and to write perfect algorithm to be the fastest.
Hsd - Roadster Mmxx
Setup of an autonomously driving vehicle on a predefined race track.
The track can turn for a race.
The vehicle recognizes the racetrack without any outside interference and sees it as quickly as possible.
It is a challenge in the NXP CUP to race against other team contracts.

Novsuteam6
NXP Cup project
-

- 1
- 2
-
