
Totally Speed

Made by Mathilde_Ibled / Automotive
About the project
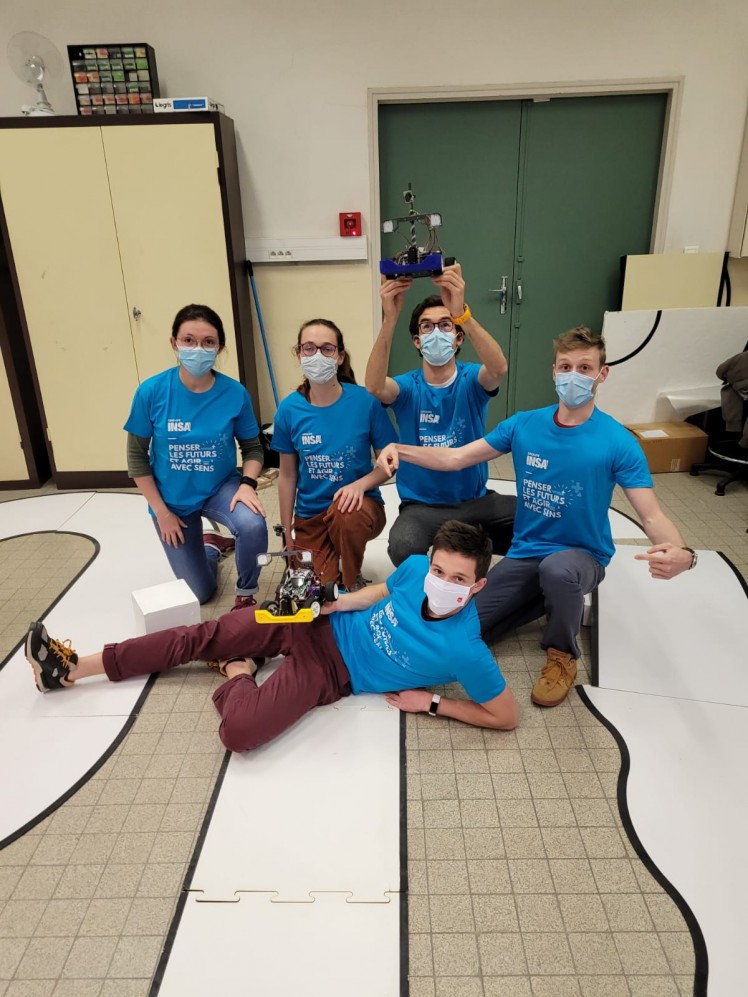
Totally Speed is a french team from the engineering school INSA Toulouse! Our project this year, as fourth-year automation and electronics students, is to develop and improve a superfast autonomous car. See you on the racing circuit at the NXP Cup in 2021!
Project info
Difficulty: Moderate
Platforms: NXP
Estimated time: 4 months
License: GNU General Public License, version 3 or later (GPL3+)
Items used in this project
Hardware components

Software apps and online services
Story
Each year our engineering school INSA Toulouse participates in the NXP Cup. The project is lead by a different team each year as it is a fourth-year student project for automation and electronics students. The challenge is to understand the work that the previous teams have done. Our goal is then to enhance solutions that have already been found and implement new solutions to improve our car.
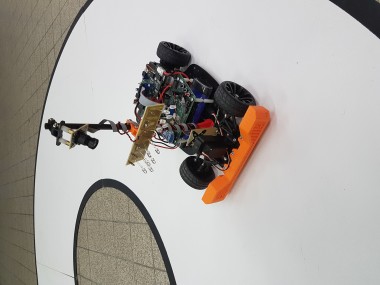
It is now time for the presentations : here is our car !
In the following video you can see our car taking a turn. It is the start of our project.
For now the car is not very fast. This year's goal is to make our car faster while ensuring that it can take turns. For this we need to improve the code for : larger amplitude for front wheels steering, management of the speed (decrease the speed before a turn for example or make it possible to drive fast around the bend), less sensitive line detection. This year the challenge is also to implement obstacle detection, as there will be a cube to avoid on the racing circuit.
We finish our project, please find some photos and videos right after.

Schematics, diagrams and documents
Code
Credits
Related products











Leave your feedback...