

Jecc

Made by jecc / 3D Printing / Automotive / Robotics / Sensors / Vehicles
About the project
We build our own differentially driven NXP-Cup platform based on a 3D-printed chassis. We also developed our own control electronics around the FRDM-KL25z board.
NXP Cup Electromaker Innovation Challenge 2021 contest winner
Project info
Difficulty: Expert
Estimated time: 4 weeks
License: GNU General Public License, version 3 or later (GPL3+)
Items used in this project
Hardware components

Story
We decided to design and build our own NXP-Cup platform from scratch. This includes all the mechanics, electronics and software.
Features
- 3D-printed chassis
- Custom control unit around the FRDM-KL25Z board: https://gitlab.com/highdriveunit/
- 2 Brushless impellers to improve the adhesion to the race track
- 11,1 V 3S LiPo
- Custom tires with silicone profile ( work in progress )
- Usage of 4 linescan cameras ( work in progress )
- pcb with reflectife sensors CNY70 for detecting the finish line ( work in progress )
- IR LEDs for improving the camera performance ( work in progress )
- open source on GitHub: https://github.com/wuehr1999/trawlerbot
Chassis
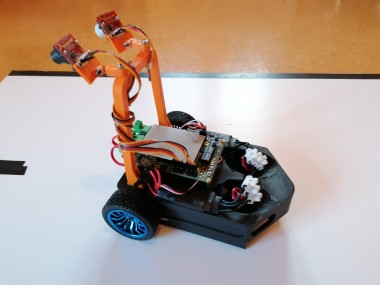
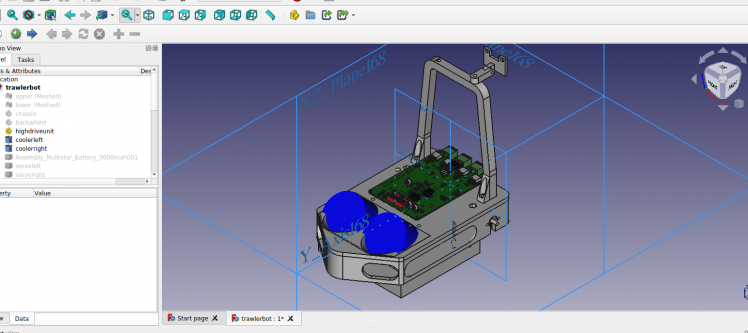
The platform is built around a 3D-printed mainchassis.
We used FreeCAD to do the design work. All design resources and production data for 3D printers are available on GitHub.
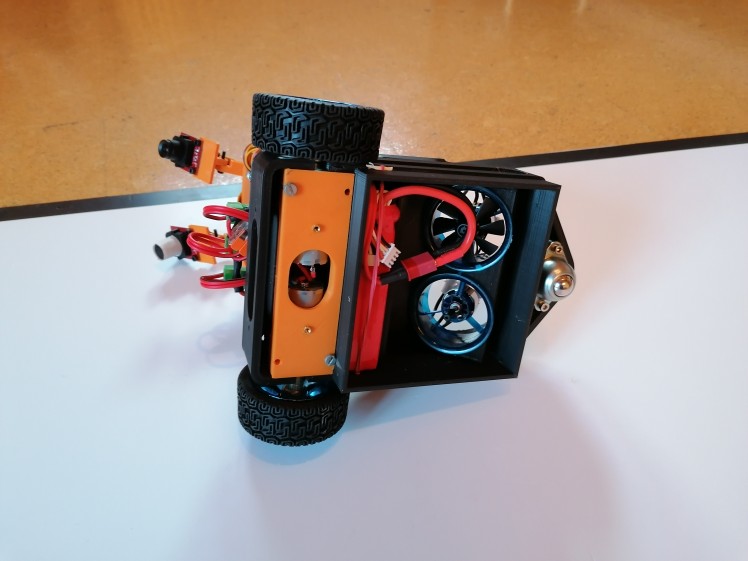
The robot is differentially driven. The front wheels and gear motors with 1000 rpm are off the shelf parts.
The backwheel is a ball roller, which is easy to install and robust. The impellers on the back of the car are installed in a 45° angle and create a vacuum in a quadratic chamber under the car, that is almost touching the ground. The battery is also mounted very low behind the front axle of the car in order to make the vehicle more controllable. We will mount a pcb with the reflectife light sensors directly under the front axle.
Currently we are experimenting with custom 3D printed wheels and silicone profiles:

Electronics
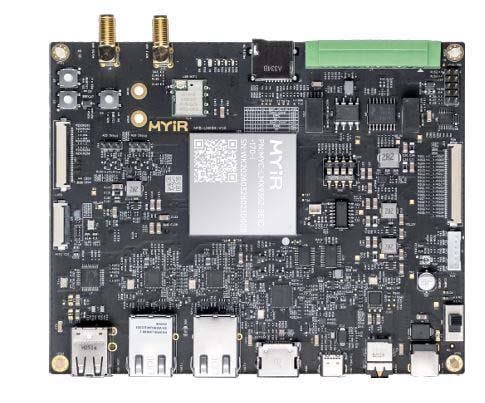
We designed and tested our own electronics platform for autonomous vehicles, the "HighDriveUnit" ( https://gitlab.com/highdriveunit/ ):


The board is a shield for the FRDM-KL25Z and has the following fatures:
Demonstration of basic functionality:
Schematics, diagrams and documents
CAD, enclosures and custom parts
Code
Credits
Related products











Leave your feedback...