
Apply a Filter
Category
- All
- 3D Printing
- Animals
- Art
- Artificial intelligence
- Astronomy
- Augmented Reality
- Automotive
- Bikes
- Clocks
- Communication
- Cryptocurrency
- Displays
- Drones
- Environmental Sensing
- Fire & Pyrotechnics
- Fitness
- Food & Drinks
- Games & Gaming
- Garden
- Health
- Holidays
- Home Automation
- IoT
- Kids & Family
- Lights
- Music
- Notifications
- Photos & Video
- Plants
- Productivity
- Retro Tech
- Robotics
- Security
- Sensors
- Sports
- Star Wars
- Sustainability
- Upcycling
- Vehicles
- Virtual Reality
- Voice
- Wearables
- Weather
Platform
- All
- 4D Systems
- 8bitcade
- Adafruit
- AIY
- AllThingsTalk
- Amazon Alexa
- Amazon Web Services
- Analog Devices
- Android
- Android Things
- Anycubic
- Apple
- Arduino
- Arm
- Arm Mbed
- Atlas Scientific
- Atmel
- Autodesk
- Avnet
- balena
- Bare Conductive
- BeagleBoard
- BITalino
- Blues Wireless
- Bluz
- Blynk
- Bolt IoT
- Bosch
- C.H.I.P
- circuito.io
- CircuitPython
- Commodore 8-bit
- ControlEverything.com
- Creator
- Cypress
- DeviceHub.net
- Dexter Industries
- DFRobot
- Digilent
- Digispark
- Eclipse IoT
- Edge Impulse
- EduBlocks
- Elecrow
- Electric Imp
- Elegoo
- Elephant Robotics
- Ender
- Espressif
- Espruino
- Everything ESP
- evive
- Firmware Modules
- GoPro
- Hackster's DeLorean
- HARDWARIO
- Helium
- Hologram
- Home Assistant
- Honeywell
- IBM
- ICStation
- Idiotware Shield
- IDT
- IFTTT
- Infineon
- Intel
- Itead
- Java
- JLCPCB
- Jupyter
- KiCad
- LabVIEW
- LattePanda
- Leap Motion
- LEGO MindStorms
- LeMaker
- Linux
- Linux Arm
- Losant
- M5Stack
- Mac
- Makeblock
- Makestro
- MATLAB
- MATRIX Labs
- Maxim Integrated
- Meadow
- MediaTek Labs
- micro:bit
- Microchip
- MicroPython
- Microsoft
- MikroE
- MikroElektronika
- MIT App Inventor
- Mouser
- MQTT
- myDevices
- nanoFramework
- NeoPixel
- Netduino
- Neuton Tiny ML
- noads
- Node-RED
- NodeMCU
- Nordic Semiconductor
- NVIDIA
- NVIDIA Jetson
- NXP
- Oculus
- ON Semiconductor
- Onion Corporation
- OpenBuilds
- OpenCat
- OpenCV
- OSH Park
- Panasonic
- Particle
- PCBWay
- Philips hue
- PHPoC
- Pi Supply
- Pimoroni
- PINE64
- PlatformIO
- Prusa
- Punch Through
- PX4
- Pycom
- Python
- Qualcomm
- RakWireless
- Raspberry Pi
- Red Pitaya
- RedBear
- Relayr
- Renesas
- RISC-V
- RobotGeek
- ROS
- RT-Thread
- Samsung IoT
- Seeed Studio
- SensiML
- Siemens
- Sigfox
- Silicon Labs
- SmartMatrix
- SmartThings
- Soldered Electronics
- Sony
- SparkFun
- STM32 Nucleo
- STMicroelectronics
- Taoglas
- Teensy
- TensorFlow
- Texas Instruments
- The Tactigon
- The Things Network
- Thinger.io
- Things On Edge
- thingSoC
- ThingSpeak
- TI LaunchPad
- TinyCircuits
- Tuya
- Twilio
- Ubidots
- Ubuntu
- UDOO
- Unity
- Visuino
- VoCore
- Walabot
- Weather Underground
- Wilderness Labs
- Windows
- WIZnet
- Xamarin
- XBee
- Xilinx
- Zerynth
Category
- All
- 3D Printing
- Animals
- Art
- Artificial intelligence
- Astronomy
- Augmented Reality
- Automotive
- Bikes
- Clocks
- Communication
- Cryptocurrency
- Displays
- Drones
- Environmental Sensing
- Fire & Pyrotechnics
- Fitness
- Food & Drinks
- Games & Gaming
- Garden
- Health
- Holidays
- Home Automation
- IoT
- Kids & Family
- Lights
- Music
- Notifications
- Photos & Video
- Plants
- Productivity
- Retro Tech
- Robotics
- Security
- Sensors
- Sports
- Star Wars
- Sustainability
- Upcycling
- Vehicles
- Virtual Reality
- Voice
- Wearables
- Weather
Platform
- All
- 4D Systems
- 8bitcade
- Adafruit
- AIY
- AllThingsTalk
- Amazon Alexa
- Amazon Web Services
- Analog Devices
- Android
- Android Things
- Anycubic
- Apple
- Arduino
- Arm
- Arm Mbed
- Atlas Scientific
- Atmel
- Autodesk
- Avnet
- balena
- Bare Conductive
- BeagleBoard
- BITalino
- Blues Wireless
- Bluz
- Blynk
- Bolt IoT
- Bosch
- C.H.I.P
- circuito.io
- CircuitPython
- Commodore 8-bit
- ControlEverything.com
- Creator
- Cypress
- DeviceHub.net
- Dexter Industries
- DFRobot
- Digilent
- Digispark
- Eclipse IoT
- Edge Impulse
- EduBlocks
- Elecrow
- Electric Imp
- Elegoo
- Elephant Robotics
- Ender
- Espressif
- Espruino
- Everything ESP
- evive
- Firmware Modules
- GoPro
- Hackster's DeLorean
- HARDWARIO
- Helium
- Hologram
- Home Assistant
- Honeywell
- IBM
- ICStation
- Idiotware Shield
- IDT
- IFTTT
- Infineon
- Intel
- Itead
- Java
- JLCPCB
- Jupyter
- KiCad
- LabVIEW
- LattePanda
- Leap Motion
- LEGO MindStorms
- LeMaker
- Linux
- Linux Arm
- Losant
- M5Stack
- Mac
- Makeblock
- Makestro
- MATLAB
- MATRIX Labs
- Maxim Integrated
- Meadow
- MediaTek Labs
- micro:bit
- Microchip
- MicroPython
- Microsoft
- MikroE
- MikroElektronika
- MIT App Inventor
- Mouser
- MQTT
- myDevices
- nanoFramework
- NeoPixel
- Netduino
- Neuton Tiny ML
- noads
- Node-RED
- NodeMCU
- Nordic Semiconductor
- NVIDIA
- NVIDIA Jetson
- NXP
- Oculus
- ON Semiconductor
- Onion Corporation
- OpenBuilds
- OpenCat
- OpenCV
- OSH Park
- Panasonic
- Particle
- PCBWay
- Philips hue
- PHPoC
- Pi Supply
- Pimoroni
- PINE64
- PlatformIO
- Prusa
- Punch Through
- PX4
- Pycom
- Python
- Qualcomm
- RakWireless
- Raspberry Pi
- Red Pitaya
- RedBear
- Relayr
- Renesas
- RISC-V
- RobotGeek
- ROS
- RT-Thread
- Samsung IoT
- Seeed Studio
- SensiML
- Siemens
- Sigfox
- Silicon Labs
- SmartMatrix
- SmartThings
- Soldered Electronics
- Sony
- SparkFun
- STM32 Nucleo
- STMicroelectronics
- Taoglas
- Teensy
- TensorFlow
- Texas Instruments
- The Tactigon
- The Things Network
- Thinger.io
- Things On Edge
- thingSoC
- ThingSpeak
- TI LaunchPad
- TinyCircuits
- Tuya
- Twilio
- Ubidots
- Ubuntu
- UDOO
- Unity
- Visuino
- VoCore
- Walabot
- Weather Underground
- Wilderness Labs
- Windows
- WIZnet
- Xamarin
- XBee
- Xilinx
- Zerynth

Move Stepper Motor Nema 17 To An Exact Position With Button
In this tutorial we will learn how to move a stepper motor NEMA17 for a certain amount of steps, and then with a push of a button repeat it.
By
Ron
Easy
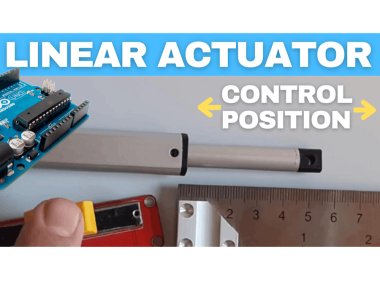
Arduino Linear Actuator Position Control With A Smooth Start
In this Simple tutorial, you will learn how to control the position of a linear actuator using the Arduino and L298N DC motor driver.
By
Ron
Easy

Ultrasonic Distance Sensor Using Atom Matrix Esp32
In this Tutorial we are going to explore how to measure a distance using the ATOM Matrix ESP32 and Ultrasonic Range sensor.
By
Ron
Easy
Basics Of Arduino (tinkercad)
Arduino and Tinkercad are two powerful tools that are transforming the world of electronics and engineering.
Easy

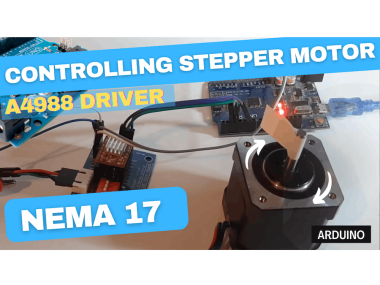
Control Nema 17 Stepper Motor With A4988 Driver And Arduino
In this tutorial we will use stepper driver A4988, NEMA17 stepper motor, Arduino Uno and Visuino to run a stepper motor.
By
Ron
Easy

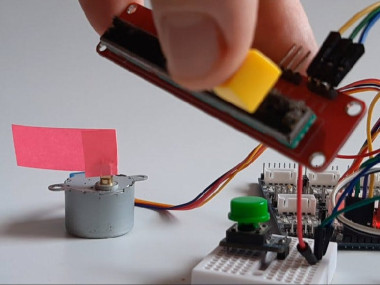
Arduino Stepper Motor 28byj-48 Control Speed And Direction
In this tutorial we will learn how to move a stepper motor, change the speed with the potentiometer and change the direction using a button.
By
Ron
Easy

How To Control A 360 Continuous Servo Motor Using Arduino
In this tutorial we are going to learn how to control the speed and direction of a Continuous Rotation Servo using a potentiometer & button
By
Ron
Easy
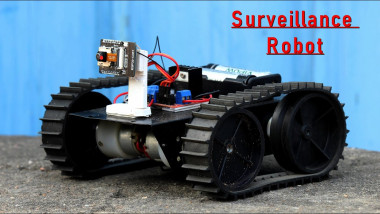
How To Make Diy Esp32 Cam Surveillance Robot
The DIY ESP32 Cam Surveillance Car is a great way to get started with building your own surveillance car. This project uses the ESP32 camera
Moderate
Predicting The F1 Champion With Tinyml
Collecting and analyzing data to predict which F1 car will finish the race first.
By
leonardo-leo
Moderate
Trukdoc – In-transit Vehicle Predictive Maintenance
An AI-based IoT solution for in-transit vehicle monitoring on Nordic Thingy:91
By
MoinakG2
Expert

Thingy Track - A Tracking Dashboard For The Nordic Thingy:91
A smart city public display portal for tracking anyone or anything. Can be used for publishing the location of things from transport, through carnival floats, to fundraisers running in a marathon.
By
alistair
Moderate
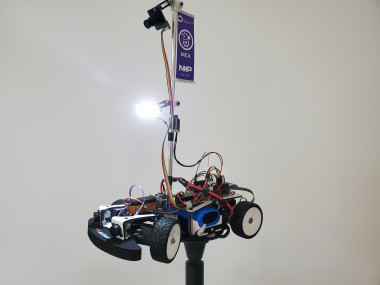
Nxpcup 2022 Project
The NXP Cup is a world wide competition where teams build and program an autonomous model car to be raced on a track.
Follow our journey to this competition.
Moderate

Thingy:91 Smart Car Tracker And Notification Service
I wanted to commute to work by bike but unfortunately I live some 75km away from my office. Mass transit isn't regular or convenient where I live (it's not set up for commuters) so car is the only viable alternative. I want to make sure my car is safe where I park it, so lets make it smart!
By
Collie147
Easy


Ini Rider - A Car Pooling Application Using Thingy 91
iNi Rider is a car ride-sharing / pooling application built using flutter, utilizing the GPS capabilities of the Nordic Thingy 91 to collect the location coordinates of the cars. The location of the car is collected using the Nordic Thingy 91 via MQTT protocol to AWS IoT Core to showcase the capabilities of the nRF9160 SIP.
Difficult

Tinyml Gearbox Fault Prediction On A $4 Mcu
How to apply tinyML approach to detect broken tooth conditions in the gearbox based upon recorded vibration data.
By
vilaksh01
Easy