
Arduino Linear Actuator Position Control With A Smooth Start

Made by Ron / Automotive / Robotics / Sensors
About the project
In this Simple tutorial, you will learn how to control the position of a linear actuator using the Arduino and L298N DC motor driver.
Project info
Difficulty: Easy
Platforms: Arduino, SparkFun, Visuino
Estimated time: 1 hour
License: GNU General Public License, version 3 or later (GPL3+)
Items used in this project
Hardware components

Story
- Arduino UNO (Or any other Arduino)
- Linear Actuator
- LN298N DC Motor Driver
- Potentiometer module
- Jumper wires
- Power Supply
- Visuino program: Download Visuino
Thank you PCBWay for supporting this tutorial and helping users learn more about electronics.
What I like about the PCBWay is that you can get 10 boards for approximately $5 which is really cost effective for professional made boards, not to mention how much time you save!
Go check them out here. They also offer a lot of other stuff in case you might need it like assembly,3D printing,CNC machining and a lot more.
Step 3: The Circuit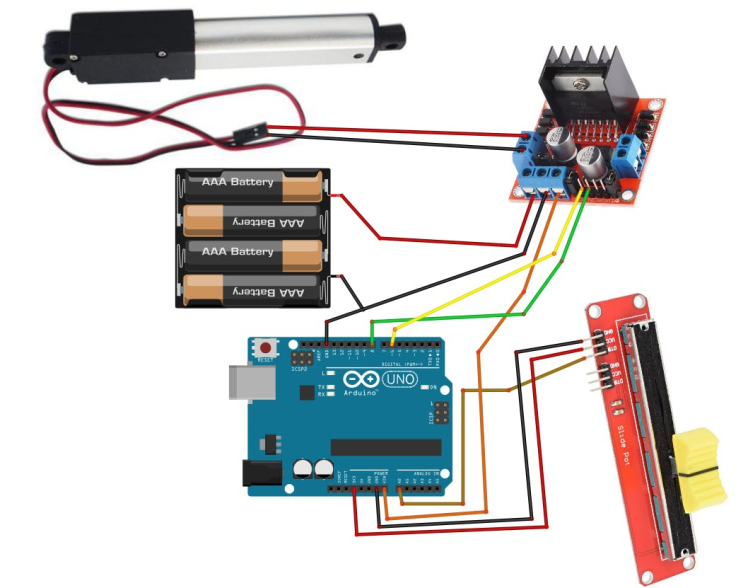
- Connect Power supply (batteries) pin (gnd) to motor driver controler pin (gnd)
- Connect Power supply (batteries) pin (+) to motor driver controler pin (+)
- Connect Power supply (batteries) pin (+) to Arduino pin (VIN)
- Connect GND from Arduino to motor driver controler pin (gnd)
- Connect digital pin(6) from Arduino to motor driver pin (IN1)
- Connect digital pin(8) from Arduino to motor driver pin (IN2)
- Connect Linear Actuator to the motor driver as you can see on the schematic
- Connect potentiometer pin [DTA] to arduino analog pin [A0]
- Connect potentiometer pin [VCC] to the breadboard positive pin [5V]
- Connect potentiometer pin [GND] to the breadboard pin [GND]
1 / 2
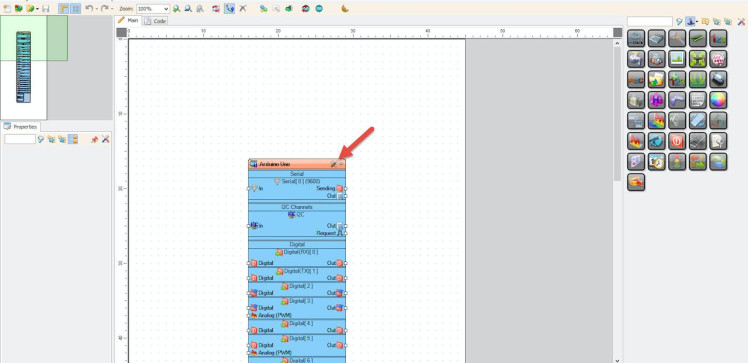
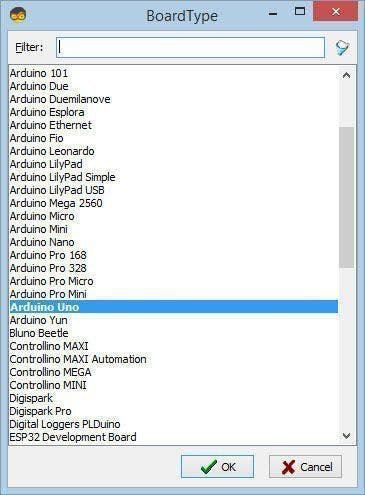
Start Visuino as shown in the first picture Click on the "Tools" button on the Arduino component (Picture 1) in Visuino When the dialog appears, select "Arduino UNO" as shown on Picture 2
Step 5: In Visuino Add Components1 / 2
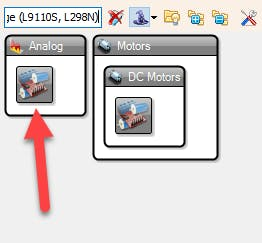
- Add "Dual DC Motor Driver Digital and PWM Pins Bridge (L9110S, L298N)" component
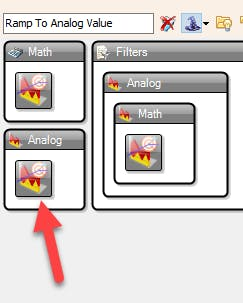
- Add "Ramp To Analog Value" component
1 / 2
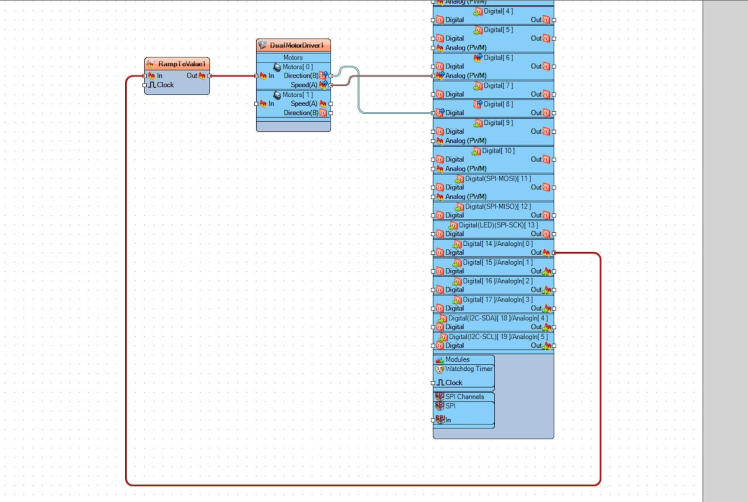
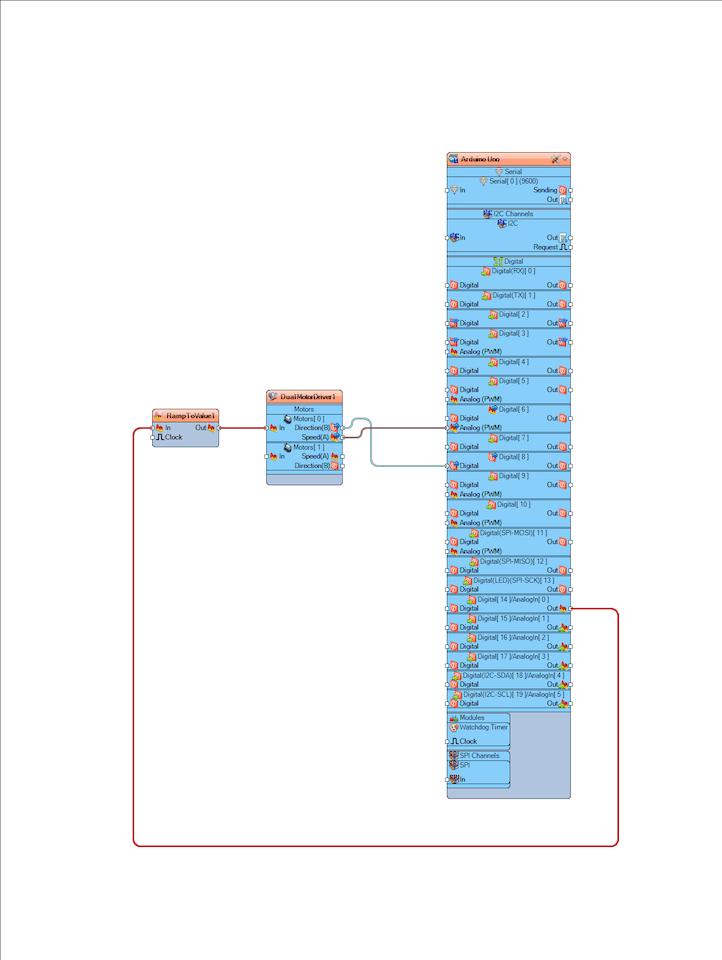
- Connect Arduino Analog pin [0] to "RampToValue1" pin [In]
- Connect "RampToValue1" pin [Out] to "DualMotorDriver1" > Motors [0] Pin [In]
- Connect "DualMotorDriver1" > Motors [0] Pin [Direction]" to Arduino digital pin[8]
- Connect "DualMotorDriver1" > Motors [0] Pin [Speed]" to Arduino digital pin Analog PWM[6]
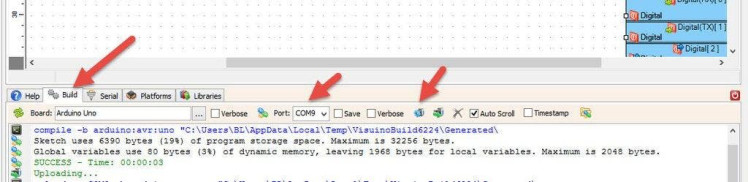
In Visuino, at the bottom click on the "Build" Tab, make sure the correct port is selected, then click on the "Compile/Build and Upload" button.
Step 8: PlayIf you power the Arduino module and change the potentiometer position then the Linear Actuator will start to move in one direction and if you move the potentiometer position to the other side it will reverse.
Congratulations! You have completed your project with Visuino. Also attached is the Visuino project, that I created for this Instructable, you can download it here and open it in Visuino: https://www.visuino.eu
Schematics, diagrams and documents
Code
Credits
Related products
















Leave your feedback...