
Your Raspberry Pi Finds Waldo Faster Than You!
Whether you know the stripey attired goon as ‘Waldo’ or ‘Wally’, it’s hard to imagine a childhood that didn’t involve at least one attempt to find his Harold Lloyd glasses peering out at you on a double spread of amusing incidents.
Some love him, others hate him, but one thing is for sure: kids are better at finding Waldo than adults. But how do robots fare?
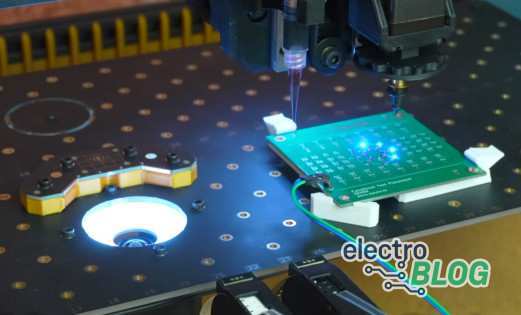
To find out, marketing company Red Pepper built a Raspberry Pi-controlled robot arm and camera to scan the pages of a ‘Where’s Waldo?’ book. Once spotted, the slightly creepy robot hand (which appears to have been removed from a toy) points to the bespectacled adventurer.
But what’s going on behind the scenes?
The prototype robot arm (a UARM Metal) uses the PYARM Python library and has a Logitech webcam mounted on the side. When ready, the arm extends to ‘read’ the book, in truth taking a photo of the double page spread, and using OpenCV to find faces and extract them.
Using the Google Auto ML Vision service, each face is compared with the predetermined Waldo model. To build the digital model of the famous character, 107 images of Waldo’s face and body were gathered in a database, ready for the software to refer to and learn from.
The threshold for a match is 95 per cent certainty; at this point, the UARM Metal arm extends to point at the position of Waldo; if it’s a scene that feature multiple Waldos, the robot will point to each one in turn.
Remarkably, the robot, known as There’s Waldo, can find Waldo in as little as 4.45 seconds. Not only is this faster than you, it’s faster than most five-year-olds.
However, it remains to be seen how well There’s Waldo might do against a double page spread of Waldo lookalikes...



























Leave your feedback...