
Can You Control a Quadcopter with an Arduino?
I don’t know about you, but I’ve had quite a few quadcopters, and they’ve all ended up crashing. Or lost.
Or both.
The problem is, once gone, they’re not easy to replace, and sometimes impossible to repair without starting from scratch. Put simply, quadcopters and other drones are popular, but not always affordable. A walk through a major electronics retailer’s out-of-town stores will reveal a collection of quadcopters and motored glider drones for upwards of $500.
Meanwhile, the cheaper, smaller models are almost always tougher to control (as I can testify!). In situations like this, you need to take matters into your own hands. Building your own quadcopter is one answer, and in the detailed video above you’ll see how an Arduino Nano has been employed as a flight controller using MultiWii.
This open source project is designed for flying radio controlled devices and is becoming increasingly popular for DIY builds like this. Check the MultiWii wiki for more information.
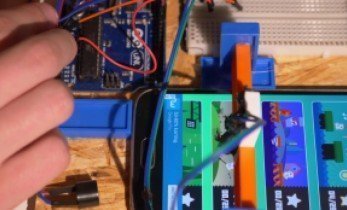
For this project, an existing quadcopter body, with motors and rotors, was employed. The video illustrates how the Arduino Nano was set up alongside the transmitter, Bluetooth module, three-axis accelerometer/gyro sensor, wires, LED, and a resistor. With these soldered to a board, the hard work of calibration begins, first with a traditional RC controller, and then with a mobile device running the EZ-GUI Ground Station app.
Calibration, of course, is vital for remaining in control of your quadcopter (as is an appreciation of the weather). Spending time getting this right should help you avoid crashing your quadcopter into, say, a tree...
More details (as well as the code, Arduino sketch, and schematics) have been provided for you to replicate this project. Got an old quadcopter lying around that could benefit from an improved flight control system? Why not give this a go?























Leave your feedback...