
Nxp Cup Bcjm Arcar 2

Made by Ryancooper98 / 3D Printing / Automotive / Environmental Sensing / Robotics / Vehicles
About the project
Logbook of our autonomous car for the NXP Cup 2023.
Items used in this project
Hardware components

View all
Software apps and online services
Story
NXP organizes the "EMEA’s pro-level autonomous model car competition" every year, wherein participants must navigate a previously unknown course. This project pertains to the 2022-2023 competition.
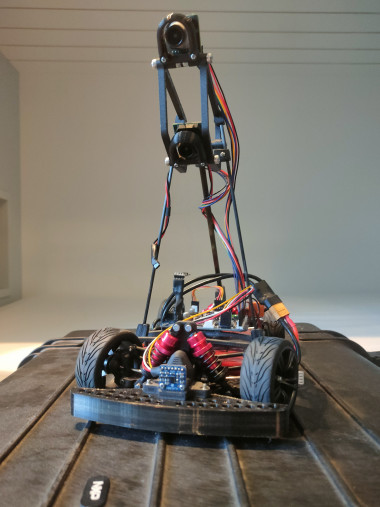
Our team constructed a car almost entirely from scratch, utilizing a board designed by HE-ARC as its foundation. We utilized Fusion 360 to design the car and then 3D-printed certain components with carbon fiber filament. Carbon fiber rods were also incorporated into the structure to enhance rigidity while keeping weight at a minimum. Our design prioritized a low center of gravity. The car is powered by a powerful brushless motor and utilizes top-quality rear and shafts. Most of the mechanical parts were self-manufactured. The car boasts four-wheel drive, ensuring excellent grip and acceleration/braking capabilities.
The project progressed in several steps. Initially, we focused on understanding and working with the board, testing it by driving the car in a straight line.
Subsequently, we incorporated a camera to detect lines.
The third step involved detecting stop lines, followed by driving around a simple track such as a roundabout.
The forth step involved navigating a cross section, with the fifth step entailing driving the car on a track we could find on the day of the competition.
In the sixth step, we identified and detected obstacles for bonus points.
Finally, we optimized our code to improve the car's speed while driving.
Short video of the car during mechanical development:
CAD, enclosures and custom parts
Code
Credits
Related products











Leave your feedback...