
How To Develop A Pose Estimation Application

Made by Johanna / Artificial intelligence / Fitness / Games & Gaming / Sports
About the project
Heads on to metaverse!
Project info
Difficulty: Easy
Platforms: Intel, Linux, Mouser
Estimated time: 1 hour
License: GNU General Public License, version 3 or later (GPL3+)
Story

Details
Here we go!
Part 1: Configure the PC
The following commands are operated on the PC. Currently, we support Ubuntu versions greater than 16.04.
- Install libusb and ffmpeg
$ sudo apt-get update
$ sudo apt-get install libgl1-mesa-dev -y
$ sudo apt-get install unixodbc -y
$ sudo apt-get install libpq-dev -y
$ sudo apt-get install ffmpeg -y
$ sudo apt-get install libusb-dev -y
$ sudo apt-get install libusb-1.0.0-dev -y
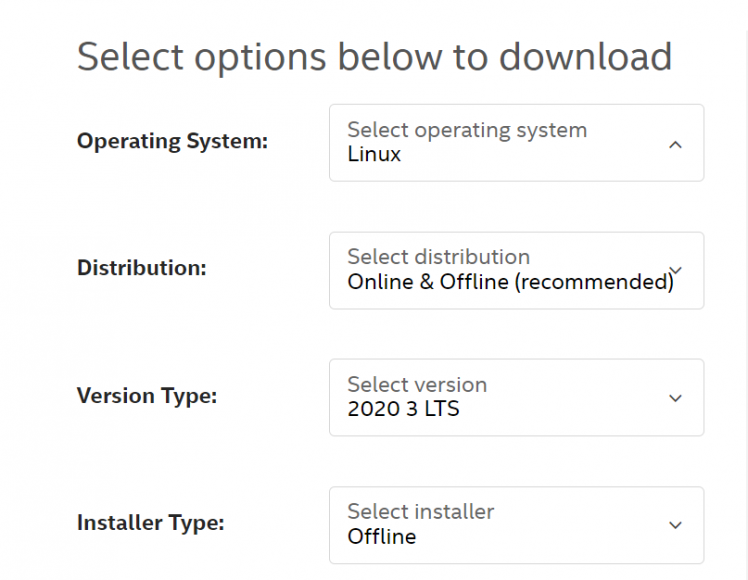
- Install OpenVINO
Download the Intel Distribution of OpenVINO Toolkit from the Intel website:
https://www.intel.com/content/www/us/en/developer/tools/openvino-toolkit-download.html
Version:2020.3LTS
Installation procedure reference:
https://docs.openvino.ai/latest/openvino_docs_install_guides_installing_openvino_linux.html#
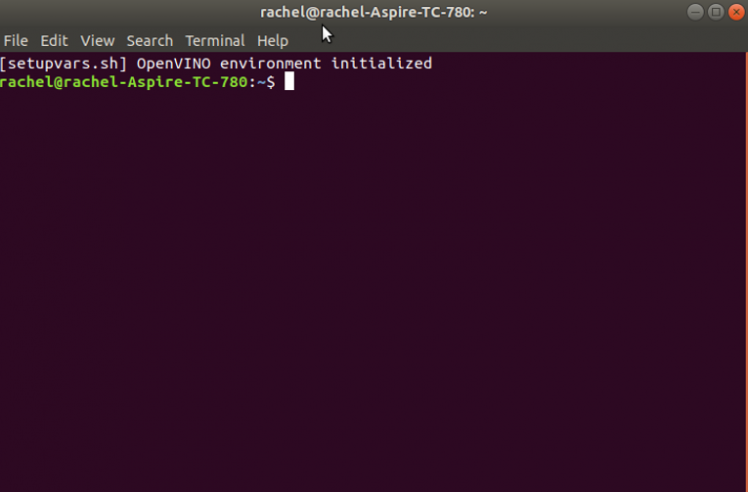
The installation path: /opt/intel/openvino_<version>
After the installation is successful, open a terminal and see that the OpenVINO environment is initialized.
- Clone OpenNCC repo
$ git clone https://github.com/EyecloudAi/openncc.git
- Update File
1. Clear the original folder ‘human_pose_estimation_demo‘
$ sudo rm -r /opt/intel/ openvino_<version>/inference_engine/demos/human_pose_estimation_demo/
2. Copy the human_pose_estimation_demo folder in openncc_cdk folder
$ sudo cp -r ~/openncc_cdk/SDK/Example/Linkage_demo/work_with_OpenVINO/human_pose_estimation_demo/ /opt/intel/ openvino_<version>/inference_engine/demos/

Part 2: Compilate
- Enter this path:
$ cd /opt/intel/ openvino_<version>/inference_engine/demos/
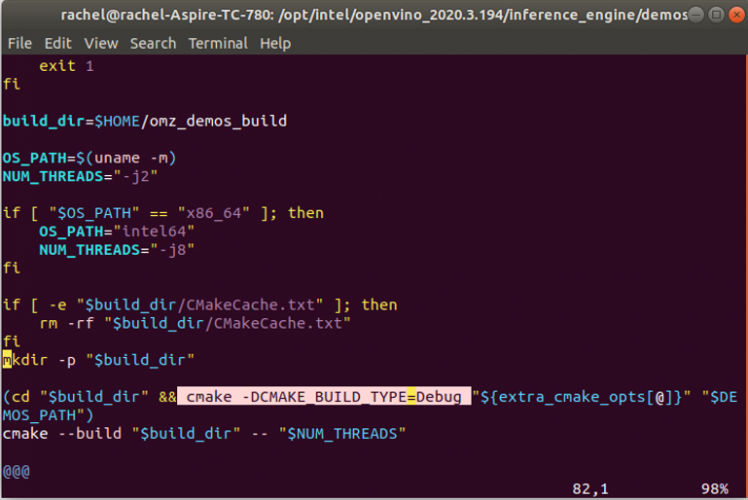
- Edit the “build_samples.sh” script file
Change “cmake -DCMAKE_BUILD_TYPE=Release” to “cmake -DCMAKE_BUILD_TYPE=Debug”
$ sudo vim build_samples.sh
//cmake -DCMAKE_BUILD_TYPE=Debug
- Exit after saving
$ :wq!
- Execute compile command
$ sudo ./build_samples,sh
- Compilation result
$cd ~/omz_demos_build/intel64/Debug/
$ ls
If you can see the human_pose_estimation_demo file, the compilation is successful, otherwise, you will have to rule out the failure for the cause and recompile it.

Part 3: Deployment the configuration
- Copy the module folder in openncc_cdk/SDK/Example/Linkage_demo/work_with_OpenVINO/Debug folder to omz_demos_build/intel64 folder
$ sudo cp -r ~/openncc_cdk/SDK/Example/Linkage_demo/work_with_OpenVINO/Debug/module/ ~/ omz_demos_build/intel64/
- Copy the moviUsbBoot file in openncc_cdk/SDK/Example/Linkage_demo/work_with_OpenVINO/Debug folder to omz_demos_build/intel64/Debug folder
$ sudo cp ~/openncc_cdk/SDK/Example/Linkage_demo/work_with_OpenVINO/Debug/moviUsbBoot ~/ omz_demos_build/intel64/Debug/
- Copy the fw folder in openncc_cdk/SDK/Example/Linkage_demo/work_with_OpenVINO/Debug to /omz_demos_build/intel64 folder
$ sudo cp -r ~/openncc_cdk/SDK/Example/Linkage_demo/work_with_OpenVINO/Debug/fw ~/ omz_demos_build/intel64/
- Enter ~/openncc_cdk/SDK/Tools/deployment folder,Obtain the permission to access a USB device
$ cd ~/openncc_cdk/SDK/Tools/deployment
$ sudo ./install_NCC_udev_rules.sh
- Reboot the PC
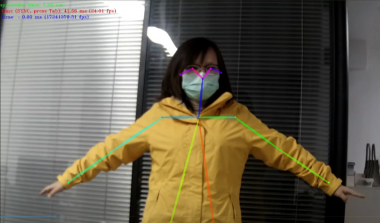
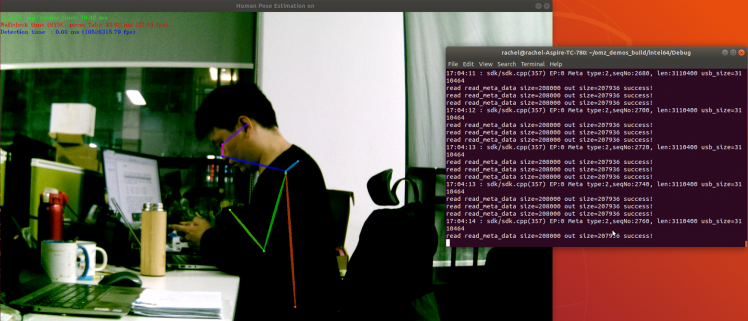
Part 4: Run Program
- Go to the ‘omz_demos_build/intel64/Debug’ folder
$ cd ~/ omz_demos_build/intel64/Debug
- Execute the script to run the model
$ ./human_pose_estimation_demo -i cam -m ../module/human-pose-estimation-0001.xml -d CPU
Credits
Related products






Leave your feedback...