
Arduino-powered Robot Controlled With The Tactigon
Made by The Tactigon / Robotics / Sensors / Wearables
About the project
We used The Tactigon to control an Arduino-powered robot via BLE. Moving The Tactigon as a 3D steering wheel is awesome!
Project info
Difficulty: Easy
Platforms: Arduino
Estimated time: 3 hours
License: Creative Commons Attribution CC BY version 4.0 or later (CC BY 4+)
Items used in this project
Hardware components




Story
Overview
This post will show how to take advantages of The Tactigon’s BLE Central capabilities. We wanted to control our robot by using The Tactigon as a “3D steering wheel” controlling speed with pitch and steering with roll. We made so few changes in the Alphabot2 original Bluetooth example code and wrote a sketch for The Tactigon to connect to the robot’s BLE characteristic and write in wheels speeds.
What we need
The Tactigon with a configured Arduino IDE Robot. We used a 2 wheels robot with Arduino board and BLE radio interfaced with UART. Other kind of robots or custom ones can work as well. Robot BLE MAC Address and Characteristic
FunGathering BLE MAC Address and Characteristic
After our environment is configured and our boards are ON, we need to gather BLE MAC Address and Characteristic. To do so we used a free android application called
BLE Scanner.
Few seconds after the application should show the robot’s BLE:
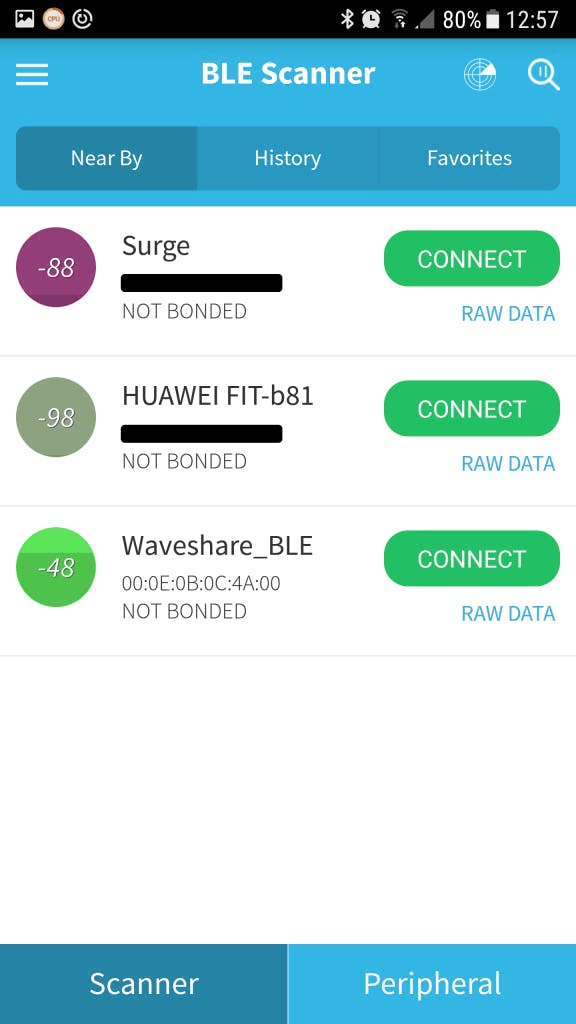
As we see, all BLE devices around us are showed in this section. We need to write down the Waveshare_BLE MAC address: in this instance it is: 00:0E:0B:0C:4A:00 By clicking on the CONNECT button we access to device’s informations as attribute, service and custom characteristic.
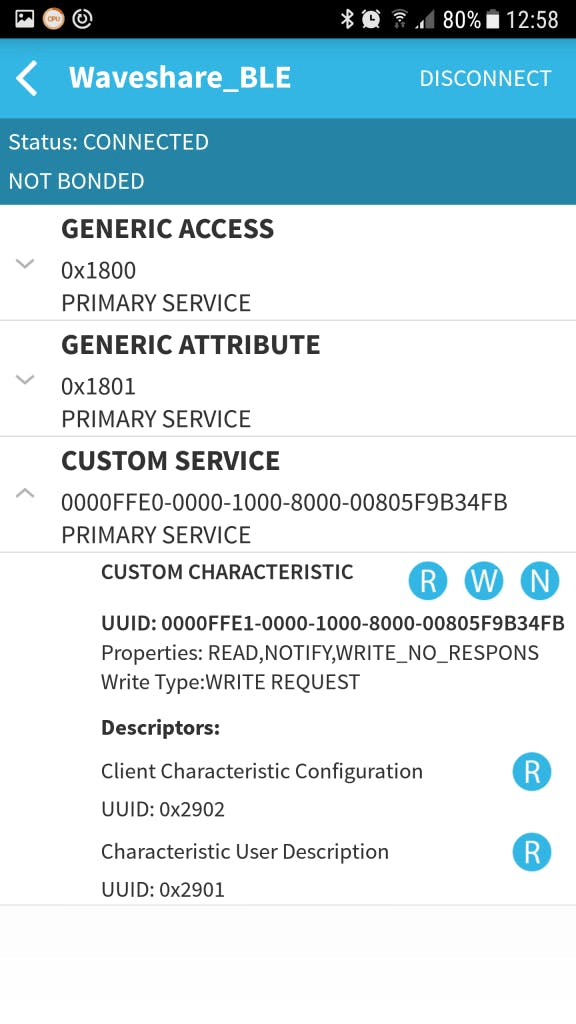
Here we need to write down the CUSTOM CHARACTERISTIC UUID, in this case: 0000ffe1-0000-1000-8000-00805f9b34fb. With this items we can set our Tactigon BLE to act as BLE Central in the setup() section of the code.
The Tactigon sketch
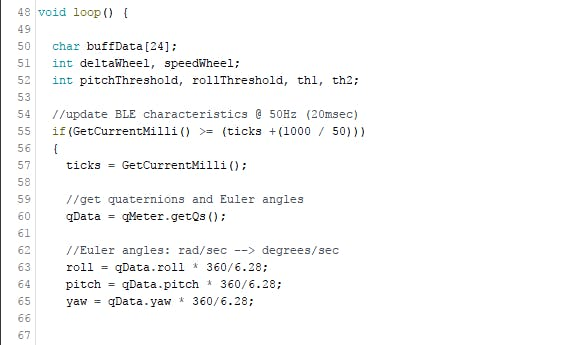
loop()
In this section we have the core of the sketch. At a frequency of 50Hz, we update quaternions and euler angles.
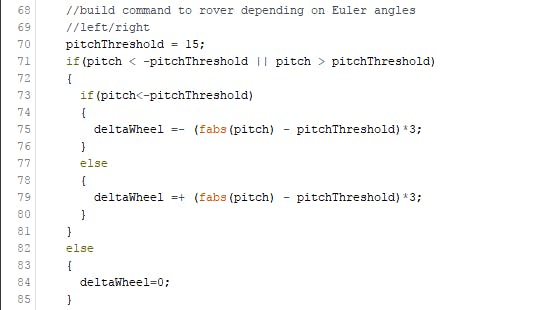
Analizyng pitch angle provided by Tactigon library, we can determine steering radius by slowing internal wheel and accelerating external wheel.
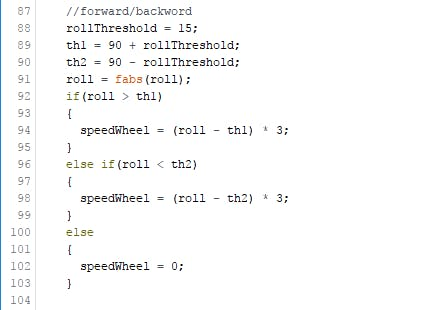
Analizying roll, instead, we can determine travel speed of the robot.
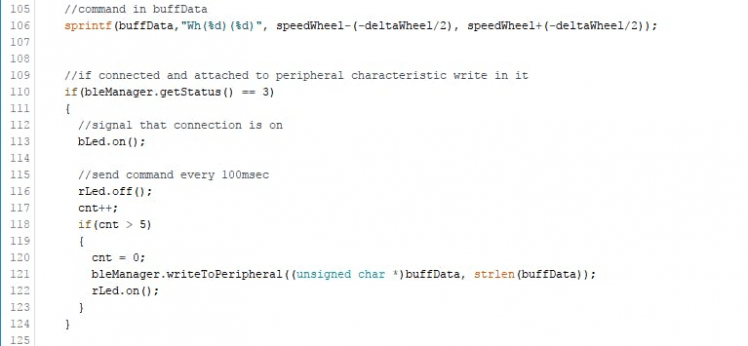
With a sprintf we prepare the buffer to write in the characteristic.
Robot sketch
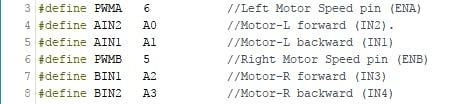
Since our Bluetooth sends received data over UART, we get wheels speed directly in the serial buffer. We have set robot pins as follows, all as output:
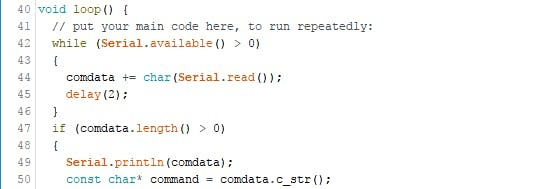
To parse the command we first read all the serial buffer and verify if it is longer than 0:
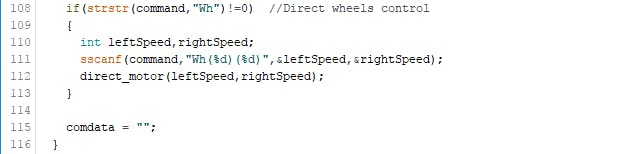
If the command contains “Wh” we can so parse the string and gather leftSpeed and rightSpeed.
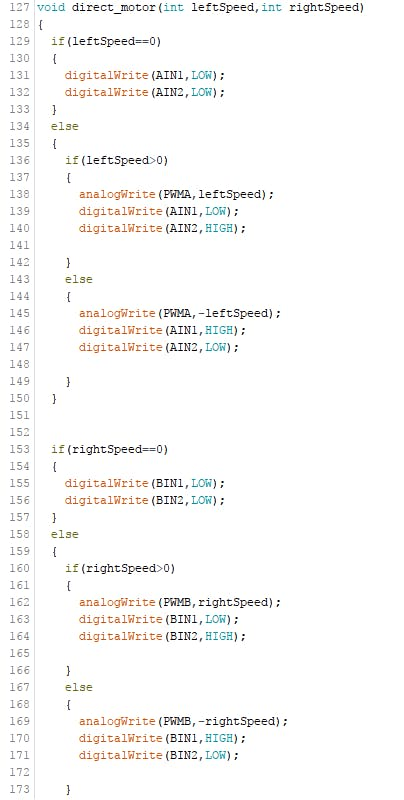
The direct_motor function assign the speed transmitted by The Tactigon to each wheel of the robot. By doing so The Tactigon will act as a virtual-steering wheel!
Final Considerations
This sketch shows a potential application of The Tactigon, with the BLE Central mode is possible to connect to existing BLE devices and gather informations or control them.
Stay tuned for more Tactigon’s code!
Code
Credits
The Tactigon
The Tactigon is a brand of Next Industries Milano. Next Industries is a born of a passion to develop devices and sensors fit for Iot Technology. Our team is made of incredible experts in movement detection for big structural monitoring systems, software development and wearable device.
Related products
















Leave your feedback...