
Arduino Based Self Stabilising Platform

Made by zeeshan0309 / Robotics / Sensors
About the project
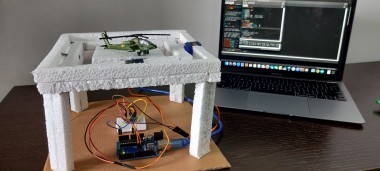
Idea is to make a platform which dynamically stabilises itself in a sort of gimbal-ish fashion. I saw a primitive version of this floating on reddit a few months ago, in which only single axis was stabilized. So here's my design with dual axis stabilization. It performs quite well for how simple its mechanism actually is!
Project info
Difficulty: Easy
Platforms: Arduino
Estimated time: 3 hours
License: GNU General Public License, version 3 or later (GPL3+)
Items used in this project
Hardware components



Hand tools and fabrication machines

Story
Here I've shown how I made my Dual-axis Self Stabilizing Platform using "not so complex" methods lol. Self levelling systems have always fascinated me, whether they be in the for of a Gimbal or an Owl's head (yeah! if you don't know about this, google it. Really cool how owls can stabilise their head).
Basically the entire system has 3 main blocks-
- The MPU6050 sensor which measures acceleration and rotations
- The Microcontroller which, obviously, does all the processing
- The servo motors which rotate and keep the platform Stable!
The frame was made with styrofoam, partly because it reduces weight, and mostly because I didn't have any other material with me at the moment haha! Nonetheless you can make you own frame with whatever material you have. Only thing to be taken care of while making this structure is that it should allow the Platform to have independent motions in the two axes- pitch and roll. Rest is upto the maker to tinker with it and optimise as per requirements
Schematics, diagrams and documents
Code
Credits
zeeshan0309
Electrical & Electronics Engineering sophomore at IIT P. I value "implementations" over mere "pen & paper" learning without practical implementations. Absolutely love making systems and see them work!
Related products
















Leave your feedback...