

A 4-axis Robotic Arm Ideal For Education | Mypalletizer
Made by Elephant Robotics / Robotics
About the project
A 4-axis palletizing robot arm that is very suitable for industrial education.
Project info
Difficulty: Easy
Platforms: ROS, M5Stack, OpenCV, Elephant Robotics
Estimated time: 1 hour
License: GNU General Public License, version 3 or later (GPL3+)
Items used in this project
Hardware components

Story
In the era of Industry 4.0, where information technology is being used to promote industrial change, robotic arms are essential in industry transformation. Automated robotic arms can reduce staff labor and increase productivity using automation technology combined with artificial intelligence, voice, and vision recognition. Robotic arms are now very relevant to our lives. Most robotic arms are built like human hands to perform more tasks such as grasping, pressing, and placing. The axes of a robotic arm represent degrees of freedom and independent movement, and most robotic arms have between two and seven axes. Here I will show you a four-axis palletizing robotic arm which is suitable for introductory learning.
What is the palletizing robotic arm?Palletizing means neatly stacking items. Palletizing robotic arms grip, transfer, and stack items according to a fixed process.
Which kind of robotic arm is more suitable? A 4-axis robotic arm? Or a 6-axis robotic arm?Let's look at the table.
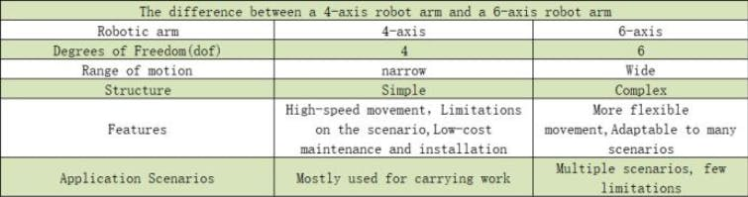
The 4-axis palletizing robotic arm can only move horizontally up and down, backward and forwards, left and right, with the end fixed towards the bottom. This is a significant limitation in terms of application and is mainly used in high-speed pick-and-place scenarios. Six-axis robotic arms are suitable for a wide range of designs and can move without dead space to reach any position within the field. We will mainly look at the four-axis palletizing robotic arm.
A video was made about the movement of two types of robotic arms.
myPalletizer 260 M5StackThe myPalletizer robotic arm shown in the video, with M5Stack-ESP32 as the central control, is a fully wrapped lightweight 4-axis palletizing robotic arm with an overall finless design, small and compact, and easy to carry. The weight of myPalletizer is 960g, payload is 250g, working radius is 260mm. I think it is designed for individual makers and eductional using. With the multiple extension interfaces, we can learn the machine vision with the AI Kit.

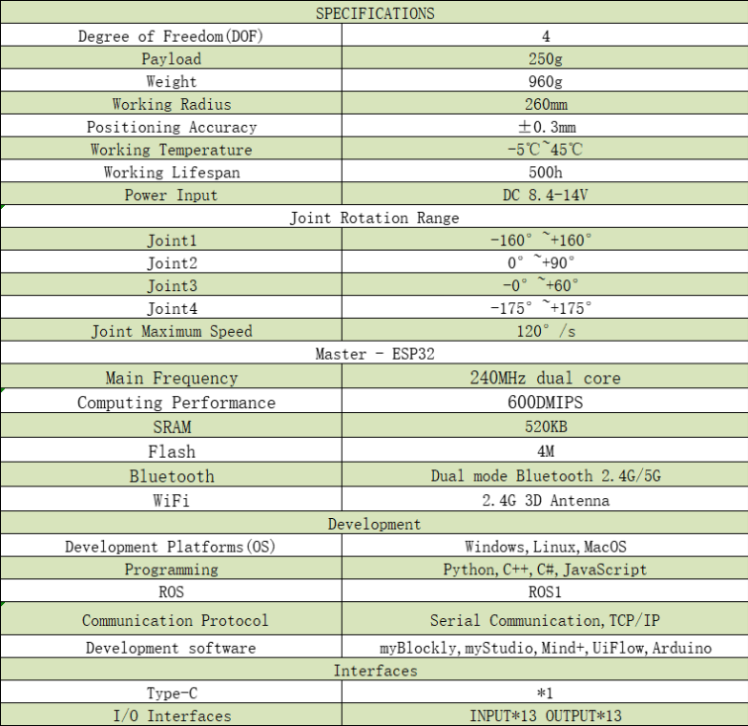
There are many four-axis (4DOF) robotic arms in industry, the mainstream being represented by palletizing robotic arms. Compared to 6-axis robotic arms, myPalletizer has a more straightforward structure, fewer joints, less stretching, faster reaction times, and faster-operating efficiency and are better to use than 6-axis robotic arms. It would be quite an excellent choice with palletizing robotic arms. Let's take a look at the myPalletizer 260-M5Stack parameter.
The suitability of a robotic arm for learning requires several conditions.
● The robotic arm must support multiple functions.
● If this robotic arm has a mainstream structure, there will be many models of industrial robotic arms to provide a reference value.
● Supporting documentation for the robotic arm is available and provides the user with basic operating instructions.
What can we learn with myPalletizer 260?RoboticsWhen programming the robotic arm, we will learn about forward and inverse kinematics, DH model kinematics, Cartesian coordinate systems, motors and servos, motion mechanics, programming, machine vision, etc. Here is a brief introduction to what DH model kinematics is.
First, let's talk about the forward kinematics and inverse kinematics.
Forward kinematics:
Determine the position and pose of the end effector given the values of the robot joint variables.
Inverse kinematics:
The values of the robot joint variables are determined according to the given position and attitude of the end effector.
DH Model Kinematics:
Mainly by constraining the position of the joint coordinate system, the transformation between the joint coordinate system and the coordinate system is disassembled into 4 steps, each step has only one variable/constant, thus reducing the difficulty of solving the inverse kinematics of the manipulator.
Parameters of myPalletizer

Parameters of myPalletizer
With a robotic arm, we can learn more about robotic armics.
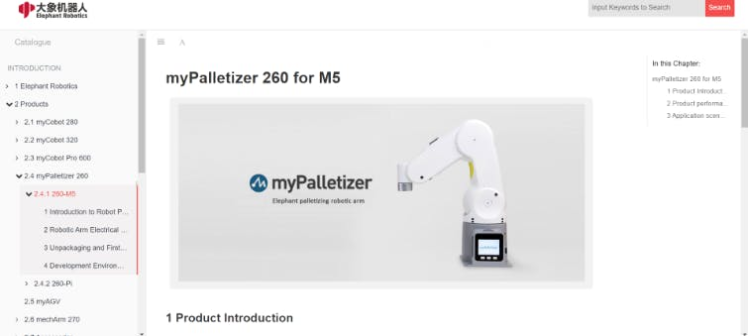
Open Source InformationElephant Robotics provides relevant information about myPalletizer in Gitbook. There are basic operation tutorials of mainstream programming languages, such as programming in python language, a series of detailed introductions from the installation of the environment to the control of the robotic arm, providing beginners with a quick way to build and use the robotic arm.
We can program the myPalletizer in Python, C++, C#, JavaScript, Arduino, ROS, giving the user more options to control the myPalletizer.
More open source code on GitHub.
Path planning in ROS

Path planning in ROS
Artificial Intelligence KitWe also provide an artificial intelligence kit, a robotic arm is not capable of human work, we also need a pair of eyes (cameras) to recognize, the combination of the two can replace manual work. A camera just displays the picture it shoots, we need to program it to realize the method of color and object recognition. We used OpenCV and python to recognize and grab the color of wood blocks, and recognize and grab objects.
Let's see how it work.
Image recognition and grabbing functions

Image recognition and grabbing functions
Color recognition and grabbing functions

Color recognition and grabbing functions
The Artificial Intelligence Kit is designed to give us a better understanding of machine vision and machine learning. OpenCV is a powerful machine vision algorithm. If you want to learn more about the code, you can look up the project on GitHub.
SummarymyPalletizer is an excellent robotic arm for those just starting! I hope this article will help you choose your own robotic arm. If you still want to know more, feel free to comment below. If you enjoyed this article, please give us your support, and like us, your like is our motivation to update!
Credits
Elephant Robotics
Elephant Robotics is a technology firm specializing in the design and production of robotics, development and applications of operating system and intelligent manufacturing services in industry, commerce, education, scientific research, home and etc.
Related products










Leave your feedback...