
3-mode Bluetooth Robot Car

Made by parikshitpagare / Communication / Robotics / Sensors / Vehicles / Voice
About the project
Robot car developed using Arduino that can operate in 3 modes - Manual, Automatic and Voice with additional features. The car is controlled wirelessly via Bluetooth from a dedicated Android app.
Project info
Difficulty: Moderate
Platforms: Android, Arduino, MIT App Inventor
Estimated time: 1 week
License: MIT license (MIT)
Items used in this project
Hardware components







Story
About '3-Mode Bluetooth Robot'
A simple robot car can generally be controlled in one way as it is programmed to operate in certain way.
What if the same robot can switch between 3 modes of control instantaneously with minimal to no delay?
- The 3-mode Bluetooth Robot is capable enough to be controlled in any of the 3 modes (Manual, Auto and Voice) instantaneously from one Android app.
- Some more features are included for each mode in the app to enhance the functionality of the robot car.
Features
- Wireless control with Bluetooth
- Dedicated Android app
- Manual control using buttons on app
- PWM based 3 levels of motor speed control.
- Ultrasonic sensor based autonomous mode with direction display on the app.
- Voice control using Google Speech Recognizer along with obstacle detection feature to avoid collision.
Hardware
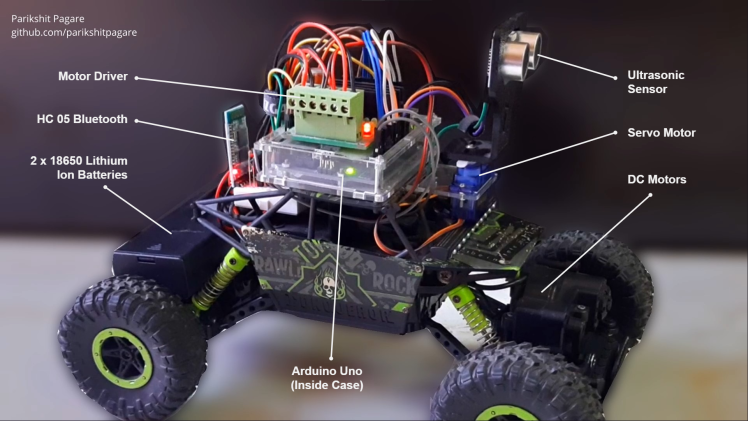
Robot Overview
The robot car is developed by modifying an existing RC car.
The body and motors of the car are kept intact while the included electronics are replaced with new components/modules.
Robot can be assembled on chassis as shown in the snapshot.
Software
- To program the microcontroller Arduino IDE is used which is commonly used with Arduino development boards.
- In addition certain libraries are required for proper functioning of the microcontroller and interfaced components.
Libraries
- Servo
- Soft PWM
Android App
The Android app is developed on MIT App Inventor platform.
Working
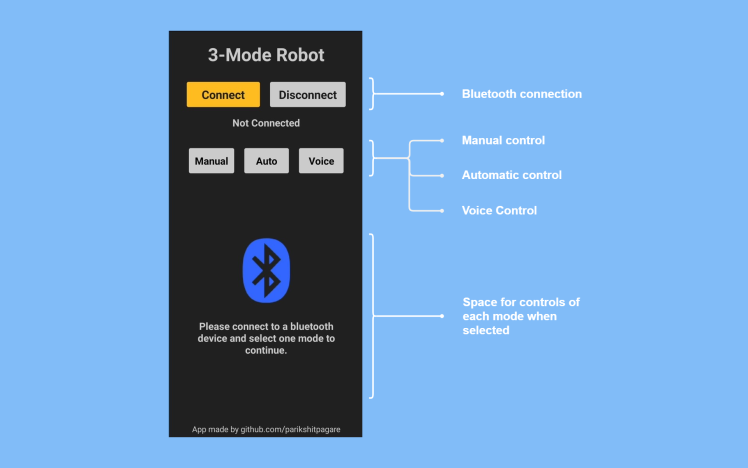
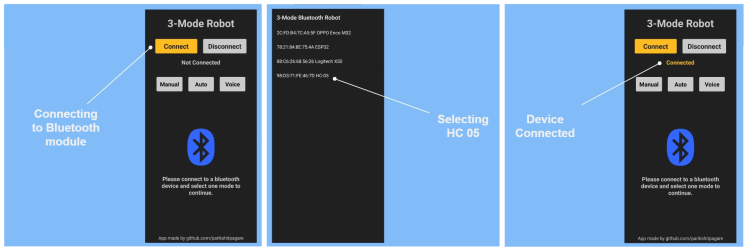
Connecting to App
- Connect/Disconnect button is provided in the app to connect with the robot car via Bluetooth.
- HC-05 module is used for Bluetooth communication.
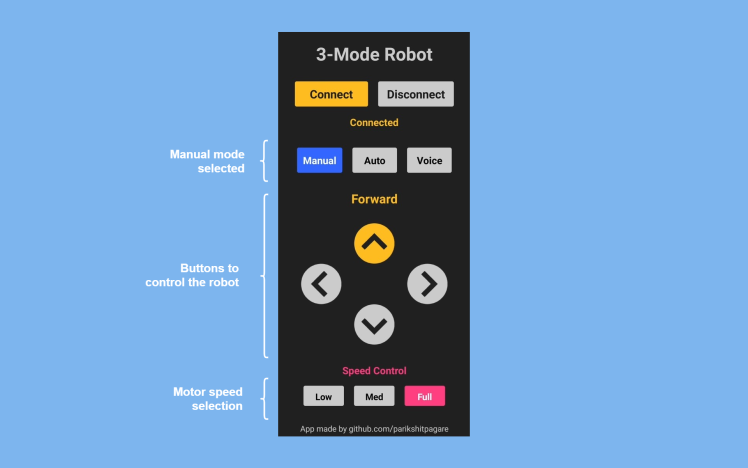
Manual Mode
- The robot is controlled manually using buttons in the app.
- PWM based 3 levels of motor speed control is implemented in the app which enables speed change on the go without delay.
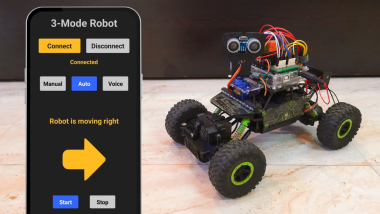
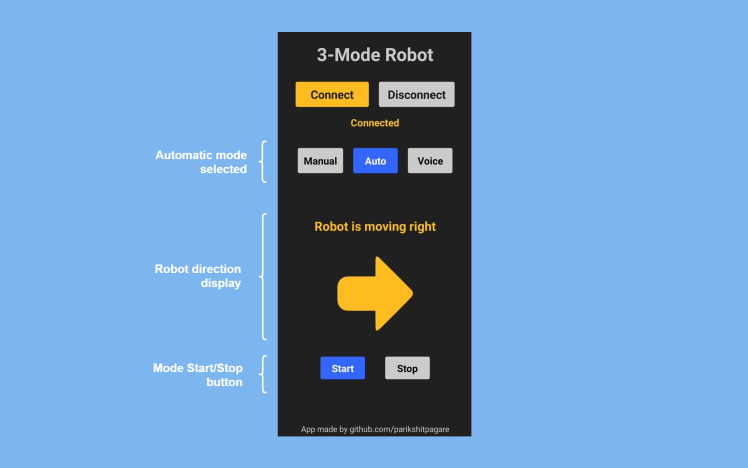
Automatic Mode
- This mode is autonomous where the robot finds its own path detecting obstacles with the help of ultrasonic sensor and servo motor.
- The app displays the direction in which the robot is moving.
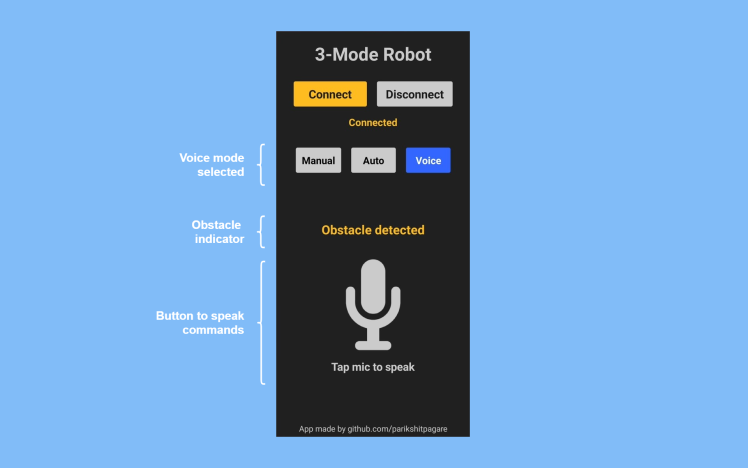
Voice Mode
- The robot is controlled using voice commands provided by the user in the app using Google Speech Recognizer.
- The robot car first scans for obstacle before executing the voice command and then proceeds.
- It stops when an obstacle is detected by ultrasonic sensor and does not obey the command further displaying 'Obstacle Detected' on the opp.
Schematics, diagrams and documents
Code
Credits
Related products













Leave your feedback...