
Shamrock Sixnav: Low-cost Compatible 6dof Space Mouse

Made by GreenCap / 3D Printing / Productivity / Sensors
About the project
Sixnav is a low-cost alternative to 3Dconnexion's line of "Spacemouse" products users of CAD are familiar with. It keeps track of movement in 6 degrees of freedom (6DOF) It enables you to manipulate objects as if you were holding them in your hand. Sixnav is based on expired patents and aims to be driver-compatible.
Project info
Difficulty: Moderate
Platforms: Raspberry Pi
Estimated time: 4 hours
License: CERN Open Hardware Licence version 1.2 or later (CERN-OHL1.2+)
Items used in this project
Hardware components


Story
 A Spacemouse Compact
A Spacemouse CompactAfter moving away from my makerspace, I was left with the realization that I no longer had access to my makerspace, which provided computers with 3Dconnexion's Spacemouse Compacts to make working with 3D models easier. Yet, I also couldn't justify the purchase of one, as a single mouse generally costs around 150 US Dollars
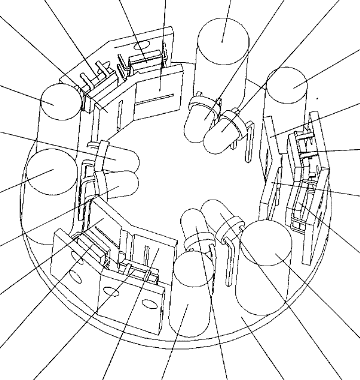 A figure in the patent describing the sensing modules
A figure in the patent describing the sensing modulesLooking into why there were no viable alternatives for the devices, I found that the sensor units in the mice were based on many patents, but I found an older design that seemed to have been in use in some older revisions of the mouse. This patent, interestingly according to Google Patents, had just recently expired in all regions.
 The Sixnav implementation of such sensing modules
The Sixnav implementation of such sensing modulesShamrock Sixnav is an implementation of such a sensing module, able to detect motion in 6 degrees of freedom (3 translation, 3 rotation), by filtering and translating the 6 sensing units. The values in each sensing unit change as the knob assembly, with all of its light-blockers move.
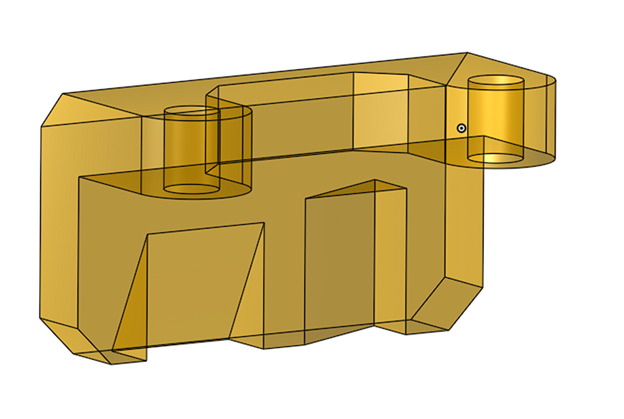 A single light-blocker part, containing blockers biased for horizontal and vertical motion. There are 3 of these in the Sixnav.
A single light-blocker part, containing blockers biased for horizontal and vertical motion. There are 3 of these in the Sixnav.Each light-blocker allows a variable amount of light through as it moves, and there are blockers that are more sensitive to vertical and horizontal motion. By combining the measurements of all sensing modules, we can infer the displacement and orientation of the knob assembly relative to the PCB.
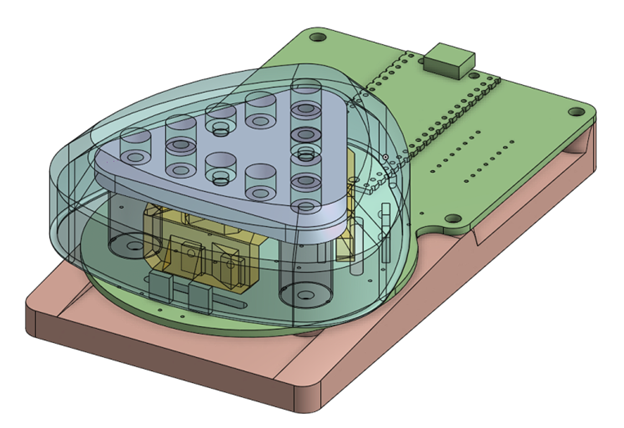 The complete assembly of the CAD model
The complete assembly of the CAD model
 The Sixnav, Put Together
The Sixnav, Put Together
Schematics, diagrams and documents
CAD, enclosures and custom parts
Code
Credits
Related products















Leave your feedback...