

Enhanced and Upgraded,The New myAGV 2023
Made by Elephant Robotics
About the project
myAGV performance has been fully upgraded, what are you waiting for?
Project info
Items used in this project
Hardware components

Story
In the rapidly evolving field of automation and robotics, we have been dedicated to providing efficient, flexible, and reliable solutions for lightweight robotic arms. However, we are also acutely aware that traditional robotic arms need to be fixed in one place, which to some extent limits their spatial application range. To overcome this limitation, we have introduced a new mobile base product—myAGV.
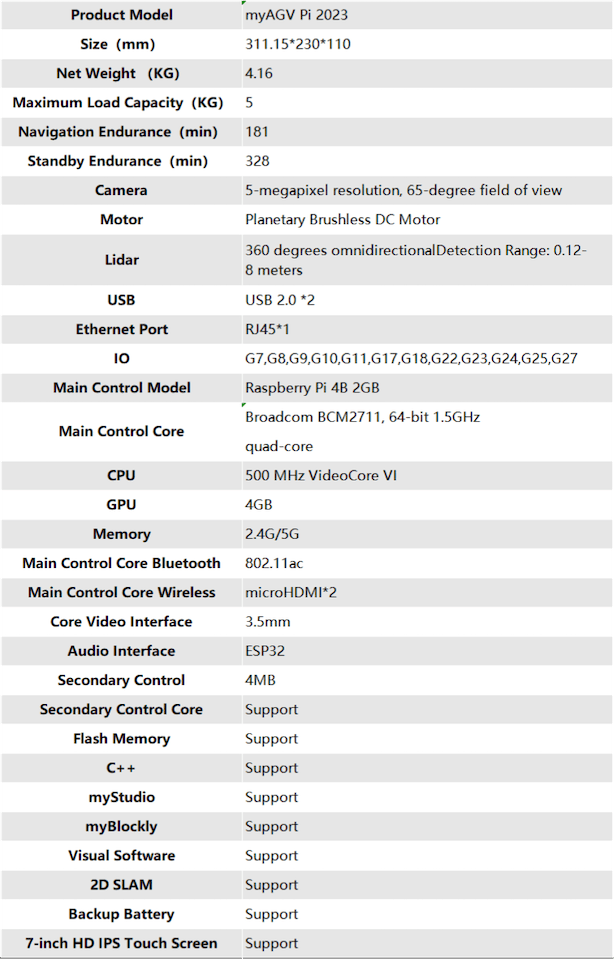
myAGV is an AGV (Automated Guided Vehicle) controlled by a Raspberry Pi 4b as its main controller. It can carry our company's lightweight robotic arm, combining the two into a composite robot. This not only significantly expands the application range of the robotic arm but also makes its spatial movement more flexible and free.

Additionally, myAGV is equipped with a 360-degree comprehensive radar and Mecanum wheel omnidirectional tires, endowing it with enhanced environmental perception and mobility. Furthermore, myAGV supports development on the ROS1 platform, capable of mapping, navigation, obstacle avoidance, and other functions, providing users with a more comprehensive and efficient solution.
In the following sections, we will detail the new iterations and upgrades of myAGV and how these changes help users better tackle the challenges of various application scenarios.
Background of Product Iteration and UpgradeSince the launch of the myAGV product, we have continuously collected and analyzed user feedback, as well as monitored market demands and technological advancements. We found that there are certain deviations in the performance of myAGV on complex terrains, mainly due to the current limitations of its navigation algorithms and structural design. Moreover, we noticed that in dynamic obstacle avoidance, the responsiveness of myAGV needs improvement, reflecting potential deficiencies in its algorithms and structural design.
To address these issues and enhance the overall performance and user experience of myAGV, we decided to iterate and upgrade the product. This upgrade not only targets existing problems but is also committed to incorporating the latest technologies to meet the ever-changing market needs. The advancements in 3D camera technology have provided us with new solutions. By integrating advanced 3D cameras, we can significantly improve the navigation accuracy and environmental adaptability of myAGV, especially in complex and dynamic environments. This iteration and upgrade are crucial steps in the future planning of the product, aiming to continuously improve performance through technological innovation, meet user expectations, and maintain a leading position in the highly competitive market.
Detailed Introduction of Product Iteration and UpgradeIn the latest version of myAGV, we have achieved a comprehensive performance upgrade, focusing on improving efficiency, enhancing user experience, and addressing key issues from previous versions.
1.Motor Upgrade:
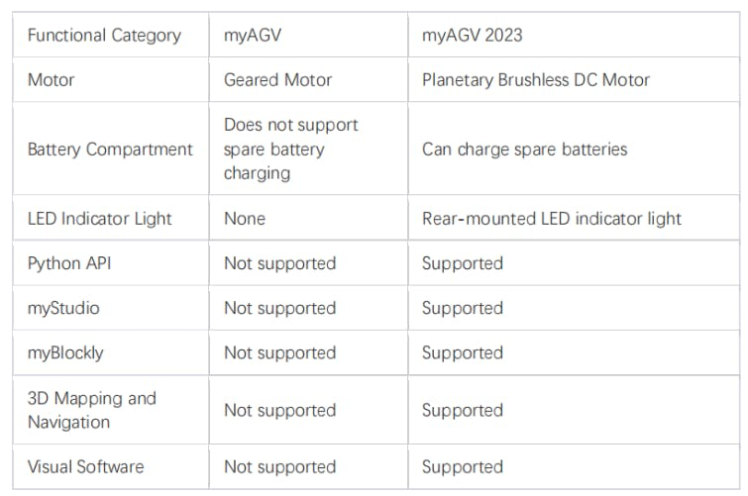
The original reduction motor has been replaced by a high-efficiency planetary brushless DC motor. This change significantly enhances myAGV's motion efficiency and reliability while reducing maintenance costs.
● Reduction Motor:

Definition: A reduction motor is a combined device integrating a gear reduction box with a motor. It reduces the speed of the motor using a gear reduction box while increasing the output torque.
Advantages: Provides high torque, relatively low cost, suitable for low-speed, high-torque applications.
Disadvantages: Larger size, lower efficiency, higher noise, and gear wear can affect performance and lifespan.
● Planetary Brushless DC Motor:

Definition: A planetary brushless DC motor is a highly efficient motor equipped with a planetary gear system and a brushless motor. The brushless motor uses electronic means (rather than mechanical brushes) to control motor operation, offering smoother operation and higher efficiency.
Advantages:
i. Higher Efficiency: Compared to brushed motors, brushless motors are more efficient as they reduce energy loss due to friction and brush wear.
ii. Longer Lifespan: Due to the lack of wear-prone brushes, brushless motors generally have a longer lifespan.
iii. Smaller Size and Weight: Brushless motors are usually smaller and lighter for the same power output.
iv. Lower Maintenance Needs: With no brush wear issues, brushless motors require less maintenance.
Applications: The planetary gear system provides efficient torque transmission, making planetary brushless DC motors highly suitable for applications requiring precise control and high energy efficiency.
Performance Enhancement:
By upgrading from a reduction motor to a planetary brushless DC motor, myAGV achieves higher energy efficiency and performance. The new motor's higher efficiency means less energy waste, thereby improving battery life. Additionally, the smaller size and weight enhance myAGV's maneuverability and flexibility. Furthermore, reduced maintenance requirements and a longer lifespan significantly improve myAGV's overall reliability and cost-effectiveness.
2.Enhanced Battery Life:
The new myAGV boasts a standby battery life of 328 minutes and a working battery life of 181 minutes under full load.
The introduction of an optional additional battery compartment allows for a doubling of battery life, further enhancing myAGV's performance in long-duration tasks.
3.Aesthetic and Functional Improvements:
Newly added LED lights not only give myAGV a more technological appearance but also improve the visibility of its working status.
These LEDs help operators to monitor the status of myAGV in real-time.
4.Enhanced Programming Interface:
To better meet the needs of developers and advanced users, a Python API interface has been introduced, allowing for more flexible control of myAGV's movements.
from pymycobot import myAGV
# Create a agv object
ma = myAGV('/dev/ttyAMA0',1000000)
# Set up LED lights
ma.set_led(mode, R, G, B)
# Get firmware version number
ma.get_firmware_version()
#Get the total current of the motor
ma.get_motors_current()
#Control the car to rotate forward, backward, left, right and forward/counterclockwise.
ma.move_control(direction_1, direction_2, direction_3)
'''
Parameters:
direction_1 – (int) Control forward or backward: 0 ~ 127 is backward, 129 ~ 255 is forward, 128 is stop.
direction_2 – (int) control left and right movement: 0 ~ 127 is right, 129 ~ 255 is left, 128 is stop.
direction_3 – (int) control rotation: 0 ~ 127 is clockwise, 129 ~ 255 is counterclockwise, 128 is stop.
'''
#Control the car to move forward
ma.go_ahead(go_speed)
#Control the car back
ma.retreat(back_speed)
#Control the car to pan to the left
ma.pan_left(pan_left_speed)
#Control the car to pan to the right
ma.pan_right(pan_left_speed)
#Stop motion
ma.stop()
Additionally, the graphical programming software myblockly has been launched, offering a more user-friendly experience through drag-and-drop programming.
5.Upgraded Interactive Interface:
A 7-inch touchscreen has been introduced, enabling operators to more intuitively understand myAGV's operational status and environmental information.

6.Structural and Motor Optimization:
Through upgrades to the structure and motor, we have significantly improved the positioning and navigation accuracy of myAGV in complex environments.
These enhancements in the latest version of myAGV not only make it more advanced technologically but also more reliable and user-friendly in practical applications. We believe these improvements will make myAGV more competitive in the market and provide users with a superior automated guided vehicle experience.
SummaryThe latest iteration of myAGV 2023 has introduced two versions, each centered around a different control core: the Raspberry Pi and the NVIDIA Jetson Nano. Each version is specially designed for different application scenarios and performance needs, ensuring they meet a wide range of user requirements.
In this article, we have focused on the comprehensive performance upgrades of myAGV, showcasing how continuous technological innovation enhances product performance and user experience. These upgrades aim to ensure that myAGV maintains a leading position in the automated guided vehicle industry while providing users with more efficient and reliable solutions.
In future articles, we will delve into the specific features and application scenarios of these two versions, helping you understand which version of myAGV is more suited to your specific needs. Stay tuned for more in-depth analysis and practical guides about myAGV, designed to help you fully utilize the powerful capabilities of this innovative product.
Code
Credits
Elephant Robotics
Elephant Robotics is a technology firm specializing in the design and production of robotics, development and applications of operating system and intelligent manufacturing services in industry, commerce, education, scientific research, home and etc.
Related products















Leave your feedback...