
Color Follow Robot With Pixy2 Cam

Made by ashokr / Artificial intelligence / Photos & Video / Robotics / Sensors
About the project
This robot follows the color with Pixy2 Camera.
Project info
Difficulty: Moderate
Platforms: NXP
Estimated time: 5 days
License: GNU General Public License, version 3 or later (GPL3+)
Items used in this project
Hardware components

Story
Hello Everyone,
The story starts from here, I received the PixyCam2 board and decided to do something with that. Initially I checked the functionality of the board, the attracted one feature is color connected mode. In this mode you can detect the object color and its XY positions and window sizes. for more details you an refer here.
The 1st stage would be installing pixymon and setting up your signature for al colors.
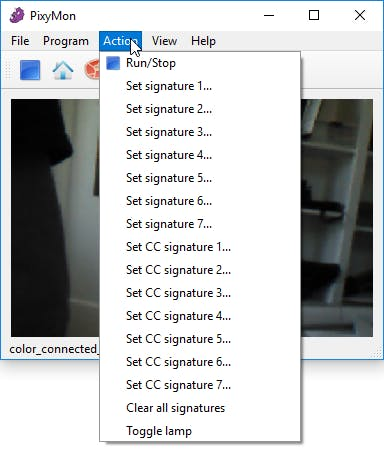
example: signature 1 name = "Red Ball" & crop the RED object region on the screen. likewise set few signature with different object colors. The signature will be stored internally on Cam.
Next setup is establishing i2c communication with pixyCam, It has its own format of frame. Its good to start from here .
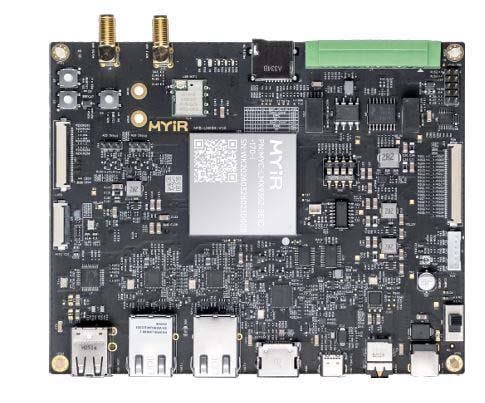
In my case I used Nxp's Rapid IoT kit for i2c interface, once you able to read data from PixyCam, we are ready to setup the demo.
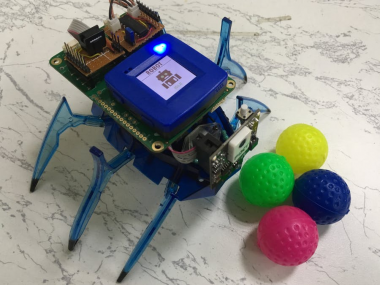
In the application side I have wrote driver to run DC motors base on the detected object size. If size reduces means object is far and move the robot. If object size is big we stop the movement. In the main color screen we choose the color for robo to follow it. the robot will not respond to other colors.
Unfortunately I had scarab robot with broken legs so managed to make it work.
The working demo is here. for instant response
Schematics, diagrams and documents
Code
Credits
Related products











Leave your feedback...